“种一棵树最好的时间是十年前,其次是现在。”特斯拉在去年3月发布了基于英特尔凌动(Apollo Lake)芯片的新版多媒体控制器MCU 2(媒体控制器单元),并在今年4月发布了其自主研发的SOC(片上系统)自动驾驶硬件HW3(FSD),以支持未来全自动驾驶所需的计算能力。多媒体控制器MCU和Autopilot ECU共同构成了特斯拉的大脑,这两个硬件的最新版本已经开始在今年4月下旬生产的Model 3和5月下旬生产的Model S/X上使用。在Model 3中,特斯拉将MCU和Autopilot ECU分成两层,放入同一个外壳中(如下图),使得原来的娱乐域和Autopilot域这两个部分就像左脑和右脑的关系,在物理上结合起来形成了车载大脑部分。
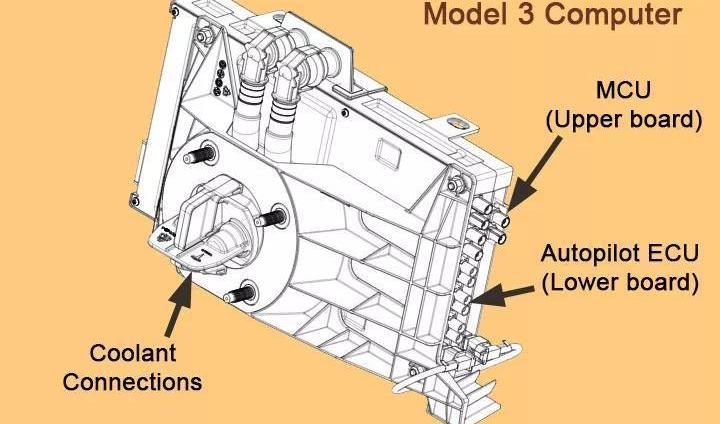
如上图,上板是媒体控制器,使用英特尔凌动E3950的4核2.0Ghz x86架构处理器,运行特斯拉基于Linux的操作系统,控制大屏的信息娱乐功能(特斯拉尚未根据GPL开源协议开放Model 3的Linux修改代码)。

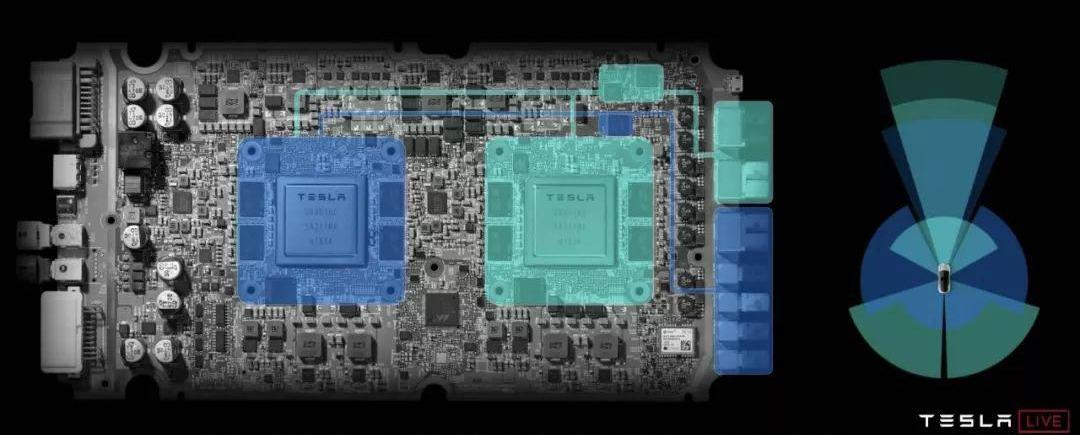
下板为Autopilot ECU,HW3版由两块特斯拉研发的FSD芯片组成。两个SOC由两组独立的电源供电,共享所有摄像机输入的超声波雷达等传感器数据,并行计算,互相检查安全冗余。
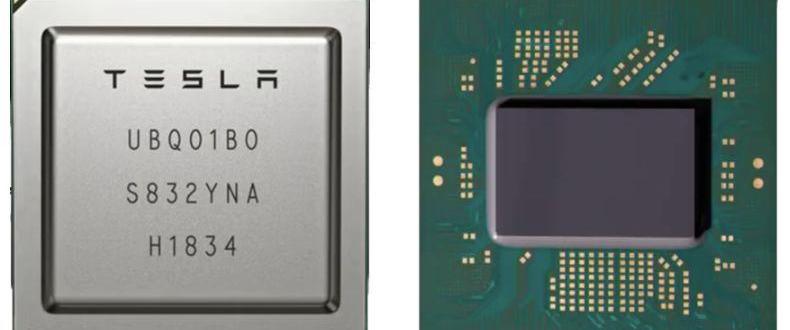
FSD芯片由三星的14纳米技术制造。如下图所示,一个SOC集成了三个基于ARM Cotex-A72架构的4核(共12核)2.2GHz CPUs、一个1GHz GPU和两个2GHz NNP(神经网络处理器)。每个NNP具有96*96个MAC和32MB SRAM的矩阵。每个NNP的处理能力是96*96*2(OPs)*2(GHz)=36.864TOPS,所以单芯片是72 TOPS,两个芯片的自动驾驶ECU是144TOPS。
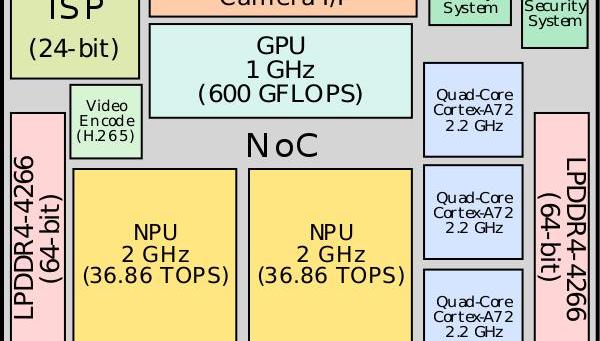
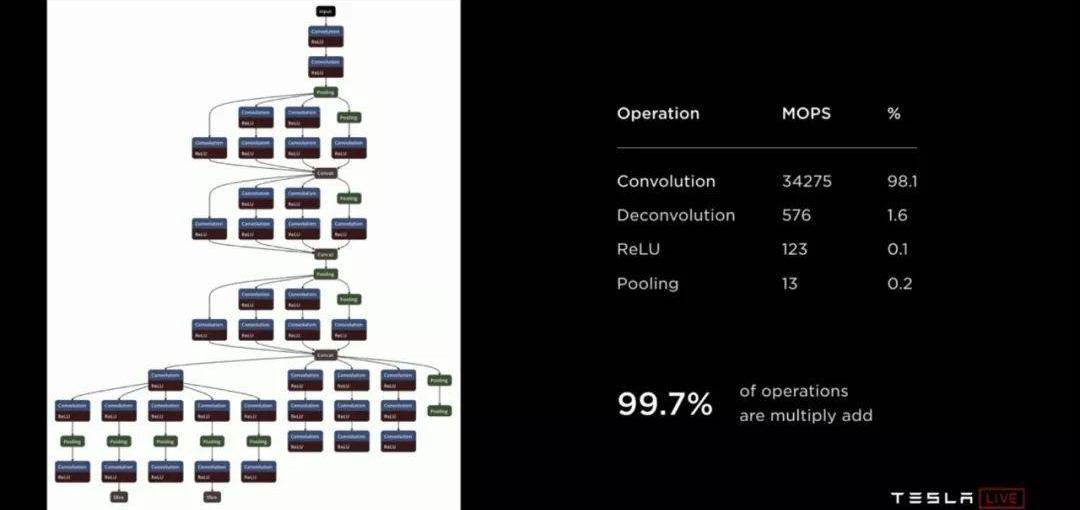
特斯拉分析应用了一种典型的使用CNN卷积神经网络的视觉感知算法,其中99%以上的计算操作都是加法和乘法(如下图)。NPU通过为特定的矩阵操作(DMA读写、卷积/反卷积、点乘等)提供硬件加速指令,可以极大地优化神经网络模型的应用。)并将模型加载到NPU的SRAM中,达到原来通用GPU处理器运算速度的21倍(在解决特定问题上)。SOC中的CPU和GPU计算能力将用于完成自动驾驶的一般控制,包括多传感器信号融合、高精度定位、路径规划、控制执行指令发布和执行结果验证。
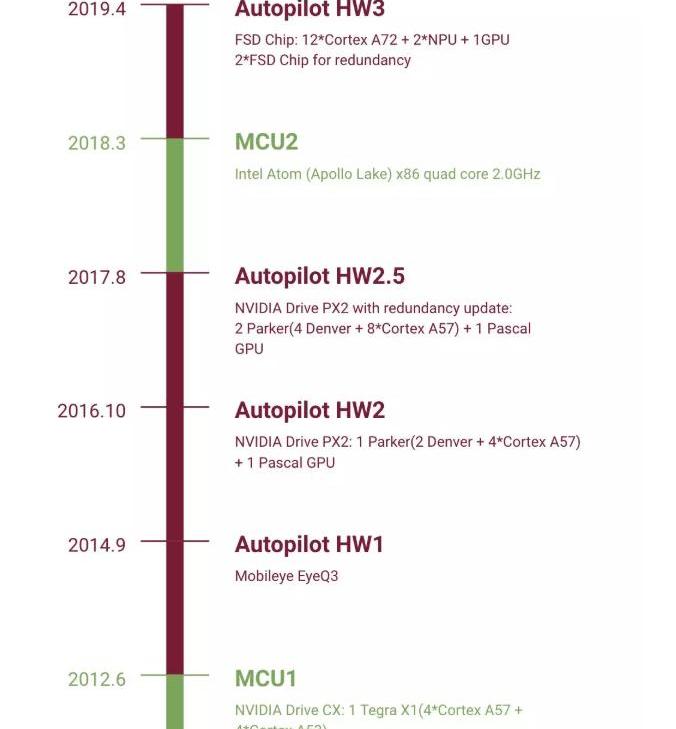
回顾过去八年,特斯拉在智能左脑和右脑上做了很多迭代(如下图)。可以看出,特斯拉在MCU媒体控制器上的投入会比Autopilot ECU少。在距离第一个版本的硬件近6年后,英伟达在放弃智能驾驶舱的驱动CX平台后,转向了英特尔的解决方案。在自动驾驶ECU方面,非常激进:从最初的认知mobile eye eq3负责基于规则的简单控制,演变为基于机器学习的自研自动驾驶软件,再到应用芯片级硬件优化和面向未来规划的全自动驾驶。
从终端用户体验的角度,特斯拉一直在宣传其在高级辅助驾驶和自动驾驶方面的功能。相比国内厂商,没有车载智能语音交互、音乐导航服务等应用便利性。优秀的地方太多了。在车载信息娱乐领域,得益于国内移动互联网的快速发展,国内厂商目前开发的智能客舱体验将领先于特斯拉;在自动驾驶领域,国内厂商和特斯拉的硬件算力发展会有一到两年的差距。在操作系统层面,娱乐域应用适用于多任务分时系统(类似于手机和PC上的IOS、Android、windows等操作系统),自动驾驶域功能适用于实时操作系统(类似于战斗机的操控系统)。不同领域的问题需要根据其特点进行优化和解决。至于娱乐领域的操作系统,特斯拉在2012年汽车Android还没有开发出来的时候选择了Linux路线也是可以理解的。目前,随着Android Automotive的快速发展,各个CP/SP厂商都提供了Android car的SDK或者可以快速集成车载应用的环境,Android Automotive将是娱乐领域操作系统的主流选择。“种一棵树最好的时间是十年前,其次是现在。”特斯拉在去年3月发布了基于英特尔凌动(Apollo Lake)芯片的新版多媒体控制器MCU 2(媒体控制器单元),并在今年4月发布了其自主研发的SOC(片上系统)自动驾驶硬件HW3(FSD),以支持未来全自动驾驶所需的计算能力。多媒体控制器MCU和Autopilot ECU共同构成了特斯拉的大脑,这两个硬件的最新版本已经开始在今年4月下旬生产的Model 3和5月下旬生产的Model S/X上使用。在Model 3中,特斯拉将MCU和Autopilot ECU分成两层,放入同一个外壳中(如下图),使得原来的娱乐域和Autopilot域这两个部分就像左脑和右脑的关系,在物理上结合起来形成了车载大脑部分。
如上图,上板是媒体控制器,使用英特尔凌动E3950的4核2.0Ghz x86架构处理器,运行特斯拉基于Linux的操作系统,控制大屏的信息娱乐功能(特斯拉尚未根据GPL开源协议开放Model 3的Linux修改代码)。
下板为Autopilot ECU,HW3版由两块特斯拉研发的FSD芯片组成。两个SOC由两组独立的电源供电,共享所有摄像机输入的超声波雷达等传感器数据,并行计算,互相检查安全性和冗余性。
FSD芯片由三星的14纳米技术制造。如下图所示,一个SOC集成了三个基于ARM Cotex-A72架构的4核(共12核)2.2GHz CPUs、一个1GHz GPU和两个2GHz NNP(神经网络处理器)。每个NNP具有96*96个MAC和32MB SRAM的矩阵。每个NNP的处理能力是96*96*2(OPs)*2(GHz)=36.864TOPS,所以单芯片是72 TOPS,两个芯片的自动驾驶ECU是144TOPS。
特斯拉分析应用了一种典型的使用CNN卷积神经网络的视觉感知算法,其中99%以上的计算操作都是加法和乘法(如下图)。NPU通过为特定的矩阵操作(DMA读写、卷积/反卷积、点乘等)提供硬件加速指令,可以极大地优化神经网络模型的应用。)并将模型加载到NPU的SRAM中,达到原来通用GPU处理器运算速度的21倍(在解决特定问题上)。SOC中的CPU和GPU计算能力将用于完成自动驾驶的一般控制,包括多传感器信号融合、高精度定位、路径规划、控制执行指令发布和执行结果验证。
回顾过去八年,特斯拉在智能左脑和右脑上做了很多迭代(如下图)。可以看出,特斯拉在MCU媒体控制器上的投入会比Autopilot ECU少。在距离第一版硬件近6年后,NVIDIA转向了……英特尔放弃智能驾驶舱驱动CX平台后的解决方案。在自动驾驶ECU方面,非常激进:从最初的认知mobile eye eq3负责基于规则的简单控制,演变为基于机器学习的自研自动驾驶软件,再到应用芯片级硬件优化和面向未来规划的全自动驾驶。
从终端用户体验的角度,特斯拉一直在宣传其在高级辅助驾驶和自动驾驶方面的功能。相比国内厂商,没有车载智能语音交互、音乐导航服务等应用便利性。优秀的地方太多了。在车载信息娱乐领域,得益于国内移动互联网的快速发展,国内厂商目前开发的智能客舱体验将领先于特斯拉;在自动驾驶领域,国内厂商和特斯拉的硬件算力发展会有一到两年的差距。在操作系统层面,娱乐域应用适用于多任务分时系统(类似于手机和PC上的IOS、Android、windows等操作系统),自动驾驶域功能适用于实时操作系统(类似于战斗机的操控系统)。不同领域的问题需要根据其特点进行优化和解决。至于娱乐领域的操作系统,特斯拉在2012年汽车Android还没有开发出来的时候选择了Linux路线也是可以理解的。目前,随着Android Automotive的快速发展,各个CP/SP厂商都提供了Android car的SDK或者可以快速集成车载应用的环境,Android Automotive将是娱乐领域操作系统的主流选择。
新能源是未来汽车的发展方向,领先于行业的技术、强大的产品实力则是未来的敲门砖。继东风悦达起亚全新一代K3上市主打年轻市场,其插电混动版本随后登场,为新生代购车人群提供新能源领域的更多选择。
1900/1/1 0:00:00(图片来源:大众集团官网)据外媒报道,大众首席执行官赫伯特迪斯(HerbertDiess)表示,大众集团对于“打造汽车行业帝国”及不计代价投资工程设计已经沉迷数十年,
1900/1/1 0:00:00补贴大幅退坡、产品价格迫降、经济环境下行等多重因素叠加下,二三线隔膜企业受到极大的冲击,要么营业收入和利润下滑严重,要么被巨额应收账款置于高危边缘。
1900/1/1 0:00:008月底正式将新能源汽车品牌命名为“恒驰”后,过去的半个月里,恒大造车的动态更加密集。
1900/1/1 0:00:009月16日晚,马斯克在推特上表示,特斯拉的服务中心现在“正处于最快速度的扩张之中”,特别是比利时、德国和西班牙等欧洲地区服务网络的建设。
1900/1/1 0:00:00日前,据外媒报道,福特汽车与壳牌子公司NewMotion达成合作,后者将为福特插电式混合动力混合动力车型提供智能充电方案。
1900/1/1 0:00:00