为了在动态环境中导航,自动驾驶汽车必须处理所有可用信息,并利用这些信息制定有效的驾驶策略。据外媒报道,加州大学伯克利分校的研究人员提出了一种社会感知方案来规划自动驾驶汽车的行为,这有助于自动驾驶汽车更好地应对周围环境的不确定性。
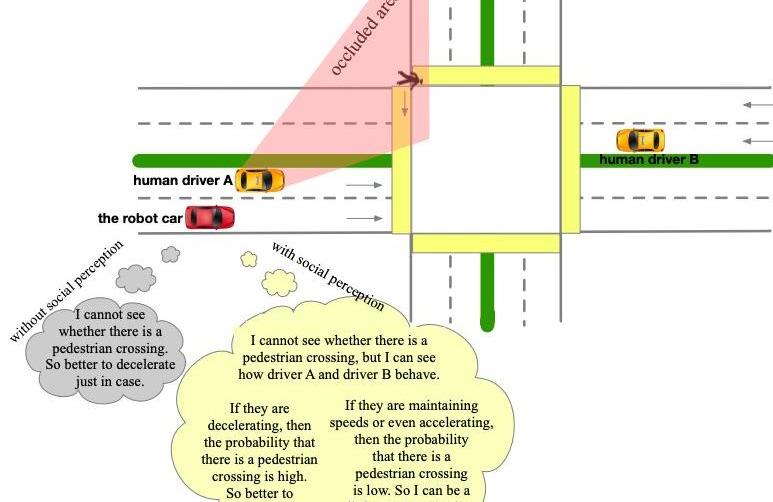
该研究项目的研究员孙丽婷说:“我的研究重点是为自动驾驶汽车设计类似人类的驾驶行为。我们的目标是让自动驾驶汽车不仅理解人类的行为,而且在感知、推理和行动方面与人类相似。”孙和她的同事观察到,人类驾驶员倾向于将其他汽车视为动态障碍,并从他们在路上的行为中推断出更多的信息。该信息通常是无法被物理检测到的被阻止的环境信息或社会信息。Sun说:“如果自动驾驶汽车能够以同样的方式行驶,这将是非常重要和有益的,因为这将使它们更智能、更人性化、更安全。在进行研究时,我们让自动驾驶汽车将所有其他道路参与者视为动态分布式传感器。”从本质上讲,这种社会感知方案,将道路上的所有汽车和障碍物视为分布在传感器网络中的传感器。这使得自动驾驶汽车能够同时观察个体行为和群体行为,并利用观察到的信息来更新“信念空间”中的各种类型的不确定性。这个计划特别关注身体状态和社会行为的不确定性。该方案将更新的社会感知信念与模型预测控制概率规划框架相结合,该框架的成本函数是通过逆强化学习获得的。概率规划模块和社会强化感知的结合使汽车能够产生社会兼容的防御行为,从而不会过于严格。Sun解释说, “通过观察他人的行为并将其与以前的行为模型进行比较,自动驾驶汽车可以推断出自己的传感器无法检测到的变量的可能状态。这可以帮助自动驾驶汽车减少感知的不确定性。与其他现有方法相比,这种想法可以有效地扩展自动驾驶汽车的感知能力,使他们能够ive更安全、更高效,不需要任何额外的硬件。研究人员在一系列传感器受阻的模拟场景中评估了该框架。他们发现,通过模仿人类的社会感知机制,感知模块检测到的不确定性降低了,最终通过非保守的防御计划产生了更安全、更高效的自动驾驶行为。他们表示,“事实上,当出现遮挡时,这一功能可以使自动驾驶汽车更高效,更适应新的驾驶环境,因为它们可以快速推断和学习周围无法物理检测到的社会信息。”未来,这一方案可以为自动驾驶汽车的发展提供信息,以便它们能够更有效地适应不断变化的环境。研究人员计划进一步发展他们的框架,并改变一些假设,使其更容易应用于现实世界的环境。Sun还解释说, “为了从其他道路参与者的行为中推断出更多不确定的信息,自动驾驶汽车应该有一个与其他参与者实际行为相似的先前行为模型。在当前的研究中,我们假设所有其他道路参与者都是理性的,并使用奖励函数来接近他们的行为生成模型。未来,我们将放宽理性pothesis使这种近似更实用。"
标签:发现
盖世汽车讯据外媒报道,美国WL
1900/1/1 0:00:00长安福特,这家曾经冲刺百万辆年销量的合资车企,自2018年起至今,销量表现让人大跌眼镜。与此同时,其产能调整和人员调整也备受关注。产能闲置严重曾经的辉煌仿佛还在眼前。
1900/1/1 0:00:00权小星武子晔曾经是合资车企中的佼佼者,北京现代如今却跌出全国乘用车销量前十,2019年4月销量为51万辆,同比下滑271。
1900/1/1 0:00:00盖世汽车讯据外媒报道,意大利汽车制造商菲亚特克莱斯勒已向法国竞争对手雷诺集团提出全股份合并提案,作为新一轮汽车行业整合浪潮的一部分。
1900/1/1 0:00:00本报记者贾丽国内家电巨头格力电器000651,在汽车领域又有新动作。
1900/1/1 0:00:00本报记者何芳实习生杜巧梅重庆报道长安牵手绿驰,传统汽车制造商与“新势力造车”又一个合作样本。5月24日,通过与长安签署联合制造协议,一直“低调”布局的新势力造车绿驰汽车,终于走到台前。
1900/1/1 0:00:00