
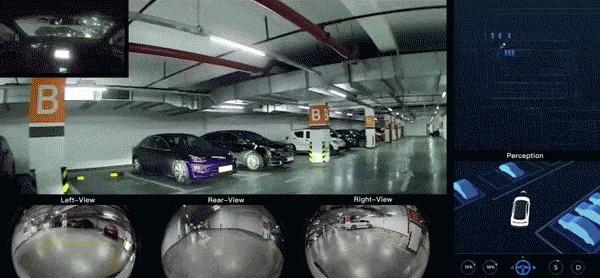
自停车产品正在进入公众视野:一方面,越来越多的主机厂将自停车视为不断提升用户体验的重大技术升级;另一方面,自动泊车成为共享出行车辆也成为自动驾驶的一大商业应用场景。许多自动驾驶创业公司也希望通过自动驾驶停车弯道超车,这被定义为自动驾驶商业化最现实的路径之一。2019年已经过半,去年开始投资自动停车R&D储备的公司大多已经走出概念阶段,步入产品化和测试量产阶段。国内自动驾驶解决方案提供商Momenta也于近日正式公布了其自动泊车解决方案Mpilot Parking。这是继3月份展示面向高速场景的量产自动驾驶解决方案Mpilot Highway之后,Mpilot系列的第二次亮相。雷锋。com新智家了解到,继高速自动驾驶(Mpilot Highway)和Mpilot Parking之后,搭载激光雷达(Robotaxi)的城市自动驾驶和搭载量产方案的全自动驾驶也将陆续发布。在混乱的AVP战场上,Momenta的自动泊车方案有什么特点?车辆类和量产硬件:没有激光雷达,使用量产传感器;千元成本;高精地图:基于视觉Slam测绘技术,Momenta支持量产车自动测绘;为了加快量产速度,Momenta的自主泊车方案倡导“在车端做到极致”,即不依赖场端技术,实现地下车库定位和车端高精度地图自动生成。Momenta自动泊车关键词:千元成本,自动画雷锋。com新智佳轻体验了Momenta自动泊车功能。下面我们来看看Mpilot停车的具体表现。本次体验位于Momenta苏州办公室地下约500平米的停车场。搭载Mpilot Parking的自动驾驶车辆成功完成了从停车场入口到任意指定停车位的自主泊车,并在停车场复杂的交通环境中实现了跨层泊车、智能绕行、避让车辆和行人、在线寻位、智能召唤等多项功能。

*错误的车辆和旁路处理。

*行人避让、车辆避让、错车处理此次试乘环境完全符合日常停车的真实场景,过程中会遇到很多复杂的情况,比如行人行走、车辆占道、路口错车、突然驶离等。Mpilot停车实时捕捉周围的车辆状态和障碍物,甚至是柱子后面的人和突然出现的行人,及时完成避障,实时规划绕行轨迹,避免自动驾驶车辆无法处理超车、逆行、占道等造成的交通拥堵。全程没有人工接管。

*车辆绕行和行人避让处理
*车辆避让和错车处理雷锋。com新智家了解到,Mpilot停车加载到量产车型时,用户可以在手机端选择指定车位或者允许车辆自行寻找车位,然后车辆可以从地上停车场入口下坡完成自主停车;用户取车时可以远程叫车到指定地点,司机上车后可以自主驶出停车场。适用场景包括居民楼、写字楼、超市、酒店、共享出行。支持车位选择:住宅和写字楼是车主每天通勤的高频停车场景,往往有固定的车位或体验赛道。网上找车位:在超市、酒店、机场等停车需求高的公共场所,车位不是固定的,所以系统需要能够实时检测车位,判断车位占用信息。自主泊车的背后是Mpilot泊车的软硬件方案,可以量产,可以调车。在车辆传感器层面,Mpilot泊车系统配备了4向全景鱼眼摄像头、1个前视摄像头、12个超声波雷达、消费级IMU和GPS,整个系统采用量产传感器。传感器的配置基本是现在高档车的标配。

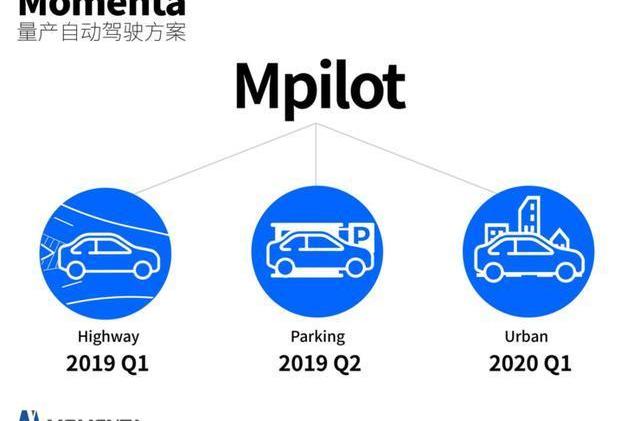
在没有激光雷达的情况下,利用车标传感器进行实时车位识别,离不开Momenta提前搭建的停车场高精度地图。高精度地图是Mpilot停车的一项核心能力,可以获取停车场的所有车位信息。在车辆行驶过程中,高精地图融合了全景感知和超声波雷达感知的结果,可以识别车位闲置状态,自动判断过往车位是否可以停放。雷锋。com新智家了解到,相比昂贵的激光雷达测绘,Momenta采用基于视觉的方案实现自动测绘。测绘采集系统使用四路全景鱼眼相机、消费级IMU和轮速传感器。在制图过程中,通过深度学习算法提取视觉语义特征,利用SLAM技术自动生成基于语义的高精度地图。整个系统可以自动绘制云和车,精度达到10cm。据Momenta高精地图负责人介绍,在没有高成本激光雷达的情况下,Momenta的视觉测绘方案完全支持量产车自主测绘,即通过众包实现快速大规模的测绘和地图更新。Momenta合伙人兼R&D董事夏衍提到,自动测绘能力是Mpilot Parking量产的关键。由于Momenta地图采集系统、测绘系统、定位系统基于同一个平台,如果真实环境和地图无法匹配,可以及时验证和更新地图的准确性。对于停车场增加或消失的元素,众包车辆可以实时自动更新补充地图元素。Momenta的环境感知和高精地图技术基于深度学习。在量产的过程中,Momenta对于如何在车端的嵌入式芯片上运行深度学习积累了大量的实践。相对于服务器的计算能力,在车辆规格级别可以量产的芯片往往提供的计算能力资源有限。比如深度学习和训练服务器使用的计算能力往往有数百TFLOPS,而尖端的汽车级芯片性能最多只有30 TOPS左右。如何将多个深度学习模型压缩到一块计算能力有限的芯片上,同时保证精度,是对工程优化能力的极大考验。Momenta的思路是在标准平台上研发极致性能,实现极致体验;然后,将终极性能压缩集成到生产芯片中。在量产的芯片上,同时集成了Mpilot Parking和Mpilot Highway的产品。Momenta从多个维度深度优化深度学习。首先,芯片上往往有不同的计算单元,深度学习的网络层需要在这些计算单元上进行优化,比如卷积;其次,可以根据不同的任务类型,自动搜索模型结构,产生高效、高精度的模型;第三,对模型进行低位量化运算,保证模型精度不损失,同时使模型在芯片上发挥极致性能;最后,根据具体芯片的特点,从算法的角度可以开发出更加芯片友好的网络和算法框架。与其他自停车产品不同的是,Mpilot停车展现了无需场地改装的自行车智能的技术能力。据夏衍介绍,Momenta还可以根据客户的需求灵活访问其他领域的信息。Mpilot Parking希望通过基于视觉的传感器方案,在车端量产方案下,最大限度发挥系统的潜力,同时加入客户定制需求,在保证安全性和鲁棒性的前提下,实现更复杂的功能。Momenta自动驾驶量产全景图L3以下ADAS系统在全球汽车行业应用广泛,L3和L4量产处于关键阶段。大规模生产是大多数自动驾驶公司的主要目标,包括Momenta。在商业布局上,Momenta实行“两条腿走路”,即现阶段可以量产车上的自动驾驶,同时开发无人驾驶方案。Momenta Mpilot是Momenta在今年3月发布的一款量产自动驾驶解决方案。场景包括Mpilot高速公路、Mpilot停车场和Mpilot市区。夏衍还透露了Momenta自动驾驶量产的时间线:2019年3月,高速自动驾驶系统Mpilot Highway被释放;2019年7月,自主泊车系统Mpilot泊车;被释放;2019年第三季度,Momenta即将发布搭载激光雷达的城市自动驾驶仪,即Robotaxi。2020年第一季度,Momenta即将发布量产方案的全自动驾驶。在个人乘用车上,用户最频繁的使用场景是往返于家和公司,也就是从停车场到停车场。Momenta希望在用户最频繁的使用场景下,提供从停车场取车、上高速环路、城市道路、停车场停车的连贯自动驾驶体验。此次发布的Mpilot Parking是持续自动驾驶体验的重要组成部分。
雷锋。com新智家了解到,Mpilot的整个方案是基于一个标准的硬件计算平台:10个摄像头,12个超声波雷达,5个毫米波雷达,辅以其他传感器。硬件方案可以同时支持不同场景下的自主驾驶,比如PilotHighway和PilotParking。通过传感器和计算单元在不同场景下的分时复用,终端用户可以获得“双重体验”,OEM客户可以实现“二合一”的成本优化。夏衍提到了“两条腿走路”背后的商业逻辑。在Momenta看来,量产自动驾驶和完全无人驾驶看似是两件事,其实是一件事,因为无人驾驶不是一蹴而就的,需要持续高效的迭代反馈。要实现持续迭代和快速反馈,核心有以下三点:大数据:持续获取数据的能力。在实际道路测试和模拟测试过程中,Momenta整合了感知数据、高精地图数据、驾驶员行为数据、众包数据等。;数据驱动算法:Momenta有一套算法工具,可以用数据驱动;数据和数据驱动算法的闭环:多种类型的数据匹配Momenta的深度学习算法,然后迭代更好的产品,包括感知技术,包括高精地图技术,不同场景下的自动驾驶技术。这些算法也可以匹配到Momenta团队,团队在运行测试过程中会产生大量数据,从而形成一个闭环自动化。自动闭环过程可以提高算法的迭代速度。自动填充数据后,算法可以自动找到最优答案,然后完成迭代乘积。数据与数据驱动算法之间的闭环被Momenta定义为实现规模化、持续反馈、提升自主驾驶能力的关键。Momenta将自动驾驶分为三种:高速场景、停车场景和城市场景。从商业化的角度来说,Momenta是基于两条腿走路过程中量产传感器的方案,尽可能统一传感器方案,让采集到的数据在量产的路线上完全无人驾驶使用、吸收、再利用。同时,低成本的量产方案可以应用到主机厂,可以实现快速规模化。大规模收集的数据应用于完全无人驾驶的研发,算法不断完善。这是Momenta闭环自动化的核心战略。
自停车产品正在进入公众视野:一方面,越来越多的主机厂将自停车视为不断提升用户体验的重大技术升级;另一方面,自动泊车成为共享出行车辆也成为自动驾驶的一大商业应用场景。许多自动驾驶创业公司也希望通过自动驾驶停车弯道超车,这被定义为自动驾驶商业化最现实的路径之一。2019年已经过半,去年开始投资自动停车R&D储备的公司大多已经走出概念阶段,步入产品化和测试量产阶段。国内自动驾驶解决方案提供商Momenta也于近日正式公布了其自动泊车解决方案Mpilot Parking。这是继3月份展示面向高速场景的量产自动驾驶解决方案Mpilot Highway之后,Mpilot系列的第二次亮相。雷锋。com新智家了解到,继高速自动驾驶(Mpilot Highway)和Mpilot Parking之后,搭载激光雷达(Robotaxi)的城市自动驾驶和搭载量产方案的全自动驾驶也将陆续发布。在混乱的AVP战场上,Momenta的自动泊车方案有什么特点?车辆类和量产硬件:没有激光雷达,使用量产传感器;千元成本;高精地图:基于视觉Slam测绘技术,Momenta支持量产车自动测绘;为了加快量产速度,Momenta的自主泊车方案倡导“在车端做到极致”,即不依赖场端技术,实现地下车库定位和车端高精度地图自动生成。Momenta自动泊车关键词:千元成本,自动画雷锋。com新智佳轻体验了Momenta自动泊车功能。下面我们来看看Mpilot停车的具体表现。本次体验位于Momenta苏州办公室地下约500平米的停车场。搭载Mpilot Parking的自动驾驶车辆成功完成了从停车场入口到任意指定停车位的自主泊车,并在停车场复杂的交通环境中实现了跨层泊车、智能绕行、避让车辆和行人、在线寻位、智能召唤等多项功能。
*错误的车辆和旁路处理。
*行人避让、车辆避让、错车处理此次试乘环境完全符合日常停车的真实场景,过程中会遇到很多复杂的情况,比如行人行走、车辆占道、路口错车、突然驶离等。Mpilot停车实时捕捉周围的车辆状态和障碍物,甚至是柱子后面的人和突然出现的行人,及时完成避障,实时规划绕行轨迹,避免自动驾驶车辆无法处理超车、逆行、占道等造成的交通拥堵。全程没有人工接管。
*车辆绕行和行人避让处理
*车辆避让和错车处理雷锋。com新智家了解到,Mpilot停车加载到量产车型时,用户可以在手机端选择指定车位或者允许车辆自行寻找车位,然后车辆可以从地上停车场入口下坡完成自主停车;用户取车时可以远程叫车到指定地点,司机上车后可以自主驶出停车场。适用场景包括居民楼、写字楼、超市、酒店、共享出行。支持车位选择:住宅和写字楼是车主每天通勤的高频停车场景,往往有固定的车位或体验赛道。网上找车位:在超市、酒店、机场等停车需求高的公共场所,车位不是固定的,所以系统需要能够实时检测车位,判断车位占用信息。自主泊车的背后是Mpilot泊车的软硬件方案,可以量产,可以调车。在车辆传感器层面,Mpilot泊车系统配备了4向全景鱼眼摄像头、1个前视摄像头、12个超声波雷达、消费级IMU和GPS,整个系统采用量产传感器。传感器的配置基本是现在高档车的标配。
在没有激光雷达的情况下,利用车标传感器进行实时车位识别,离不开Momenta提前搭建的停车场高精度地图。高精度地图是Mpilot停车的一项核心能力,可以获取停车场的所有车位信息。在车辆行驶过程中,高精地图融合了全景感知和超声波雷达感知的结果,可以识别车位闲置状态,自动判断过往车位是否可以停放。雷锋。com新智家了解到,相比昂贵的激光雷达测绘,Momenta采用基于视觉的方案实现自动测绘。测绘采集系统使用四路全景鱼眼相机、消费级IMU和轮速传感器。在制图过程中,通过深度学习算法提取视觉语义特征,利用SLAM技术自动生成基于语义的高精度地图。整个系统可以自动绘制云和车,精度达到10cm。据Momenta高精地图负责人介绍,在没有高成本激光雷达的情况下,Momenta的视觉测绘方案完全支持量产车自主测绘,即通过众包实现快速大规模的测绘和地图更新。Momenta合伙人兼R&D董事夏衍提到,自动测绘能力是Mpilot Parking量产的关键。由于Momenta地图采集系统、测绘系统、定位系统基于同一个平台,如果真实环境和地图无法匹配,可以及时验证和更新地图的准确性。对于停车场增加或消失的元素,众包车辆可以实时自动更新补充地图元素。Momenta的环境感知和高精地图技术基于深度学习。在量产的过程中,Momenta对于如何在车端的嵌入式芯片上运行深度学习积累了大量的实践。相对于服务器的计算能力,在车辆规格级别可以量产的芯片往往提供的计算能力资源有限。比如深度学习和训练服务器使用的计算能力往往有数百TFLOPS,而尖端的汽车级芯片性能最多只有30 TOPS左右。如何将多个深度学习模型压缩到一块计算能力有限的芯片上,同时保证精度,是对工程优化能力的极大考验。Momenta的思路是在标准平台上研发极致性能,实现极致体验;然后,将终极性能压缩集成到生产芯片中。在量产的芯片上,同时集成了Mpilot Parking和Mpilot Highway的产品。Momenta从多个维度深度优化深度学习。首先,芯片上往往有不同的计算单元,深度学习的网络层需要在这些计算单元上进行优化,比如卷积;其次,可以根据不同的任务类型,自动搜索模型结构,产生高效、高精度的模型;第三,对模型进行低位量化运算,保证模型精度不损失,同时使模型在芯片上发挥极致性能;最后,根据具体芯片的特点,从算法的角度可以开发出更加芯片友好的网络和算法框架。与其他自停车产品不同的是,Mpilot停车展现了无需场地改装的自行车智能的技术能力。据夏衍介绍,Momenta还可以根据客户的需求灵活访问其他领域的信息。Mpilot Parking希望通过基于视觉的传感器方案,在车端量产方案下,最大限度发挥系统的潜力,同时加入客户定制需求,在保证安全性和鲁棒性的前提下,实现更复杂的功能。Momenta自动驾驶量产全景图L3以下ADAS系统在全球汽车行业应用广泛,L3和L4量产处于关键阶段。大规模生产是大多数自动驾驶公司的主要目标,包括Momenta。在商业布局上,Momenta实行“两条腿走路”,即现阶段可以量产车上的自动驾驶,同时开发无人驾驶方案。Momenta Mpilot是Momenta在今年3月发布的一款量产自动驾驶解决方案。场景包括Mpilot高速公路、Mpilot停车场和Mpilot市区。夏衍还透露了Momenta自动驾驶量产的时间线:2019年3月,高速自动驾驶系统Mpilot Highway被释放;2019年7月,自主泊车系统Mpilot泊车;被释放;2019年第三季度,Momenta即将发布搭载激光雷达的城市自动驾驶仪,即Robotaxi。2020年第一季度,Momenta即将发布量产方案的全自动驾驶。在个人乘用车上,用户最频繁的使用场景是往返于家和公司,也就是从停车场到停车场。Momenta希望在用户最频繁的使用场景下,提供从停车场取车、上高速环路、城市道路、停车场停车的连贯自动驾驶体验。此次发布的Mpilot Parking是持续自动驾驶体验的重要组成部分。
雷锋。com新智家了解到,Mpilot的整个方案是基于一个标准的硬件计算平台:10个摄像头,12个超声波雷达,5个毫米波雷达,辅以其他传感器。硬件方案可以同时支持不同场景下的自主驾驶,比如PilotHighway和PilotParking。通过传感器和计算单元在不同场景下的分时复用,终端用户可以获得“双重体验”,OEM客户可以实现“二合一”的成本优化。夏衍提到了“两条腿走路”背后的商业逻辑。在Momenta看来,量产自动驾驶和完全无人驾驶看似是两件事,其实是一件事,因为无人驾驶不是一蹴而就的,需要持续高效的迭代反馈。要实现持续迭代和快速反馈,核心有以下三点:大数据:持续获取数据的能力。在实际道路测试和模拟测试过程中,Momenta整合了感知数据、高精地图数据、驾驶员行为数据、众包数据等。;数据驱动算法:Momenta有一套算法工具,可以用数据驱动;数据和数据驱动算法的闭环:多种类型的数据匹配Momenta的深度学习算法,然后迭代更好的产品,包括感知技术,包括高精地图技术,不同场景下的自动驾驶技术。这些算法也可以匹配到Momenta团队,团队在运行测试过程中会产生大量数据,从而形成一个闭环自动化。自动闭环过程可以提高算法的迭代速度。自动填充数据后,算法可以自动找到最优答案,然后完成迭代乘积。数据与数据驱动算法之间的闭环被Momenta定义为实现规模化、持续反馈、提升自主驾驶能力的关键。Momenta将自动驾驶分为三种:高速场景、停车场景和城市场景。从商业化的角度来说,Momenta是基于两条腿走路过程中量产传感器的方案,尽可能统一传感器方案,让采集到的数据在量产的路线上完全无人驾驶使用、吸收、再利用。同时,低成本的量产方案可以应用到主机厂,可以实现快速规模化。大规模收集的数据应用于完全无人驾驶的研发,算法不断完善。这是Momenta闭环自动化的核心战略。
坊间一直流传这么一句话:世界上只有两种混动,一种是丰田的混动,另一种是其他。
1900/1/1 0:00:00近些年,伴随新能源汽车产业狂飘突进,我国新能源汽车工厂建设如雨后春笋般出现,众多车企开始深度布局。
1900/1/1 0:00:00前不久,马自达北美公司人机接口与信息娱乐工程师MatthewValbuena,在接受外媒采访时称:“在使用触摸屏时,驾驶员必须看向屏幕,这也增加了发生交通事故的风险”。
1900/1/1 0:00:00广汽新能源坚持用创新“上坡”,消化补贴退坡增加的成本。中国的新能源市场已经进入全新的时代。随着新能源汽车补贴过渡期正式结束,新能源后补贴时代正式拉开帷幕。
1900/1/1 0:00:00据外媒报道,由于可输出高能量且充电速度快,电容器在为电动汽车和手机等未来机器提供动力方面将发挥重要作用,但是电容器成为储能设备的一大阻碍是,其存储的能量远远低于同等大小的电池。
1900/1/1 0:00:00当自动驾驶成为一种趋势时,汽车如何与路上的行人和司机进行沟通交流却又成为了一个新问题。
1900/1/1 0:00:00