
(图片来源:asahicom.jp)据外媒报道,在老年司机决定换一辆配备安全功能的汽车或上交驾照之前,汽车赛车手塔库马·阿桔希望老年司机能先坐上驾驶模拟器进行模拟。42岁的阿桔开发了一种基于虚拟现实技术的驾驶模拟器,让老年人和其他司机体验最新的安全支持系统,如自动刹车功能。驾驶员可以坐在模拟驾驶位置,戴上VR眼镜。根据驾驶员的动作,座椅可以左右、前后、上下移动;而且VR眼镜会根据驾驶员眼睛的运动来显示车内车外的场景,让驾驶员感觉自己开的是一辆真车。这款仿真车配备了先进的安全功能,如防止驾驶员误踩油门突然加速,车辆距离汽车太近时自动刹车等。例如,在便利店前的停车场,如果司机“误”踩油门,让车开过停车位,模拟车辆就会猛烈摇晃司机,让车辆停下来并报警。不过有可能车再动的时候还是会撞到便利店,因为模拟车的设计和一些配备安全支持系统的车辆是一样的。只有在自动制动功能启动后的两秒钟内,驾驶员成功踩下制动踏板,安全支持系统才会启动。阿桔是一名积极参加纳斯卡的赛车手,这场比赛中的赛车与市场上的赛车相似。2016年,阿桔开发了一个练习赛车的模拟器,并根据赛车手和其他喜欢玩驾驶电子游戏的人的要求制作了模拟器。在看了许多致命交通事故的新闻报道(尤其是与老年司机有关的报道)后,阿桔说:“将我的模拟器与虚拟现实技术结合起来,可以忠实地再现司机看到的物体与车辆之间的距离,有助于防止交通事故。”
(图片来源:asahicom.jp)据外媒报道,在老年司机决定换一辆配备安全功能的汽车或上交驾照之前,汽车赛车手塔库马·阿桔希望老年司机能先坐上驾驶模拟器进行模拟。42岁的阿桔开发了一种基于虚拟现实技术的驾驶模拟器,让老年人和其他司机体验最新的安全支持系统,如自动刹车功能。驾驶员可以坐在模拟驾驶位置,戴上VR眼镜。根据驾驶员的动作,座椅可以左右、前后、上下移动;而且VR眼镜会根据驾驶员眼睛的运动来显示车内车外的场景,让驾驶员感觉自己开的是一辆真车。这款仿真车配备了先进的安全功能,如防止驾驶员误踩油门突然加速,车辆距离汽车太近时自动刹车等。例如,在便利店前的停车场,如果司机“误”踩油门,让车开过停车位,模拟车辆就会猛烈摇晃司机,让车辆停下来并报警。不过有可能车再动的时候还是会撞到便利店,因为模拟车的设计和一些配备安全支持系统的车辆是一样的。只有在自动制动功能启动后的两秒钟内,驾驶员成功踩下制动踏板,安全支持系统才会启动。阿桔是一名积极参加纳斯卡的赛车手,这场比赛中的赛车与市场上的赛车相似。2016年,阿桔开发了一个练习赛车的模拟器,并根据赛车手和其他喜欢玩驾驶电子游戏的人的要求制作了模拟器。在看了许多致命交通事故的新闻报道(尤其是与老年司机有关的报道)后,阿桔说:“将我的模拟器与虚拟现实技术结合起来,可以忠实地再现司机看到的物体与车辆之间的距离,有助于防止交通事故。”一般来说,姿态图的优化目标是将整个图离散成点,然后建立一些边约束,最后通过优化一些点的位置来满足边约束。姿态映射也变成了一个优化问题。姿态图的挑战姿态图的整体数学模型看似简单,但有很多细节需要优化:◆如何选择顶点。比如要考虑是不是毫秒的点都要加,GPS信号不好的点要不要加。◆如何保证边缘的准确性?如何建立一个顶点与另一个顶点的相对位置?◆如何求解非线性优化?图建好之后如何做非线性优化?◆如何评价优化效果?图表是否与真实环境一致,如何评价结果满足要求。◆效率和资源。对于工程来说,数据量如此之大,你需要考虑如何设计工程算法来保证效率和资源。比如考虑是否需要定制和优化算法,如何使用GPU或者分布式计算方法。
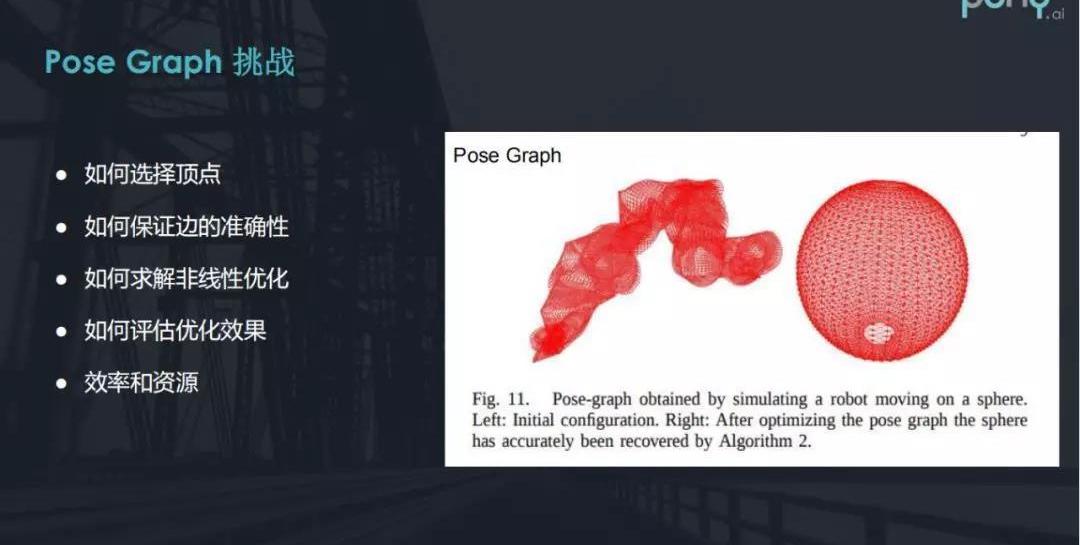
我想通过上图右边的例子解释一下姿势图——左边的原图是一个物体在一个球体上来回移动和旋转。通过建立边与边之间的相对约束,优化后,你会发现整个环境被重构为右边一个理想的、完整的球体。总之,我们的工作就是把左图变成右图。迭代最近点算法:保证边缘的约束我们前面提到,姿态图需要保证边缘的约束。为了计算这个约束,业界使用的传统经典算法叫做ICP(迭代最近点算法)。
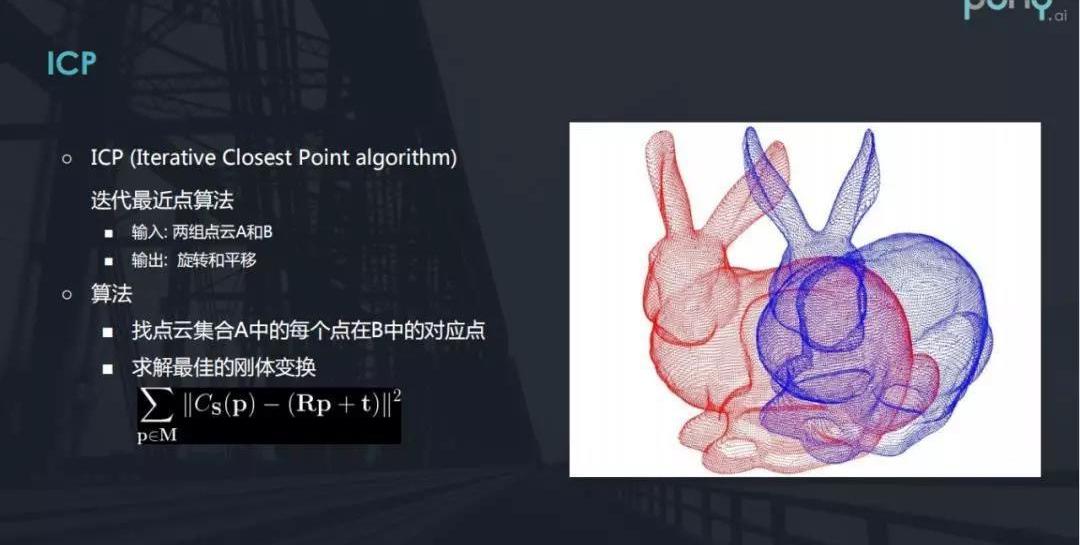
比如左边有一只红色的兔子,右边有一只蓝色的兔子。现实中两只兔子的位置是一样的,但是在图中两只兔子的位置不一样,说明有偏差。也就是说,输入是A、B两组点云,输出是两组点云之间在空间上的旋转和平移。具体算法的思路大致是:在集合B中寻找点云集合A中每个点的对应点,通过求解最佳刚体变换和迭代优化,最终得到一个收敛解。迎接挑战:消除非静态障碍
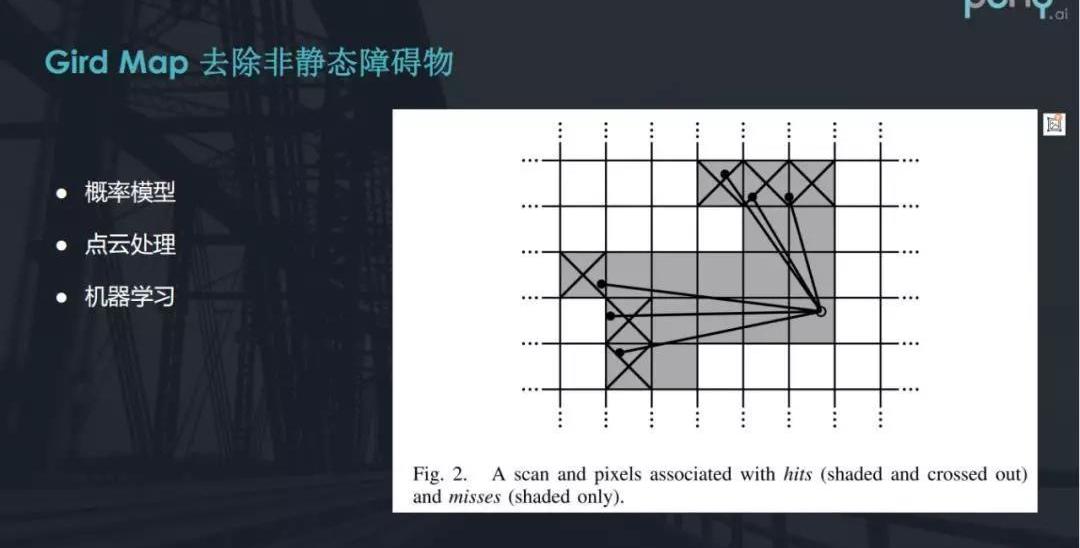
去除非静态障碍物的方法有三种:◆概率模型去除。◆点云处理,简单的概率模型是不够的,比如有时候小区路边经常停着车,有时候开走了车。……en数据采集完毕,汽车只是停在路边,然后就需要依靠线下点云处理。◆机器学习,即利用机器学习算法从地图中挖掘出非静态的物体。

上图是去除非静态障碍物前后的简单对比。在处理之前,你会发现在正确的道路上有一些汽车轮廓。当从太空中移除时,地图变得清晰得多。03如何定位自动驾驶定位的自动驾驶车辆特点对于定位系统和传统定位来说,自动驾驶车辆的位置和姿态具有以下特点:◆厘米级的精度需要精确到车辆在车道线内的具体位置,比如距离左右边缘线几厘米。◆高频低延时,要求毫秒级延时,实时传输车辆位置,否则会发生安全事故。几种定位方式的全球导航卫星系统特点:米级精度,低频干扰或遮挡解决方案:RTK(实时运动学)载波相位差技术,可达厘米级。相对定位:IMU特点:加速度计和陀螺仪在加速度和角速度三个方向的高频(一般为100HZ)累积误差。解决方案:惯性导航系统的点云定位是鲁棒的,不依赖于GPS信息。根据先前的地图,地图的准确性和实时性可能会导致定位误差。需要解决:弱特征环境。比如在桥上,向前开10米和向后开10米看到的场景都差不多。对于这种环境,如何找到准确的位置是必须考虑的问题。定位系统的多传感器融合一般来说,仅仅依靠单个传感器进行定位是不够的,所以采用多传感器融合方案。基于卡尔曼滤波模型的整体定位效果将具有更高的精度和更好的鲁棒性。卡尔曼滤波器模型卡尔曼滤波器是一种高效的递归滤波器,它可以从一系列不完全和有噪声的测量值中估计出动态系统的状态。
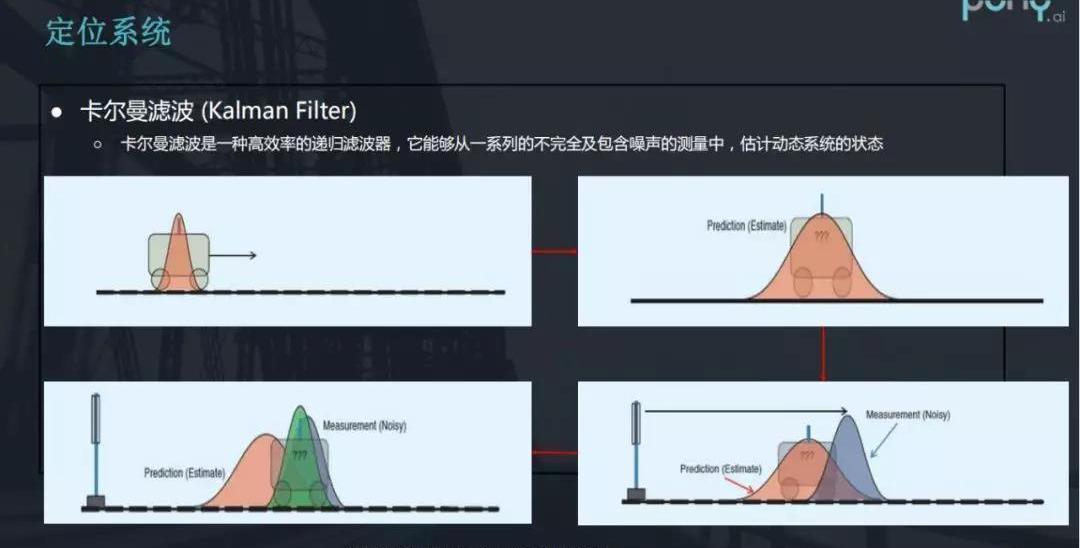
基于卡尔曼滤波模型,我们把自动驾驶车辆当时的位置看成是一个高斯分布,也就是说车辆位于某个区域内,最有可能在中间。随着车辆行驶,定位系统可以根据运动方程预测车辆的位置。假设一辆车向前行驶了10米,那么这辆车就产生了一个预测位置。然而,在实际驾驶中,预测位置和实际位置之间的误差逐渐变大。这是因为这个数据可能是IMU给的,IMU作为传感器自然会有误差。同时,假设车上装有GPS,GPS给出的位置信息相当于上图中的蓝色部分,这个定位数据也包含一定的误差。所以,我们得到了关于这辆车的两个位置信息,通过组合它们,我们可以得到更准确和可信的结果。可以看到卡尔曼滤波器在不断的更新迭代,最终达到获得更精确位置的目的。
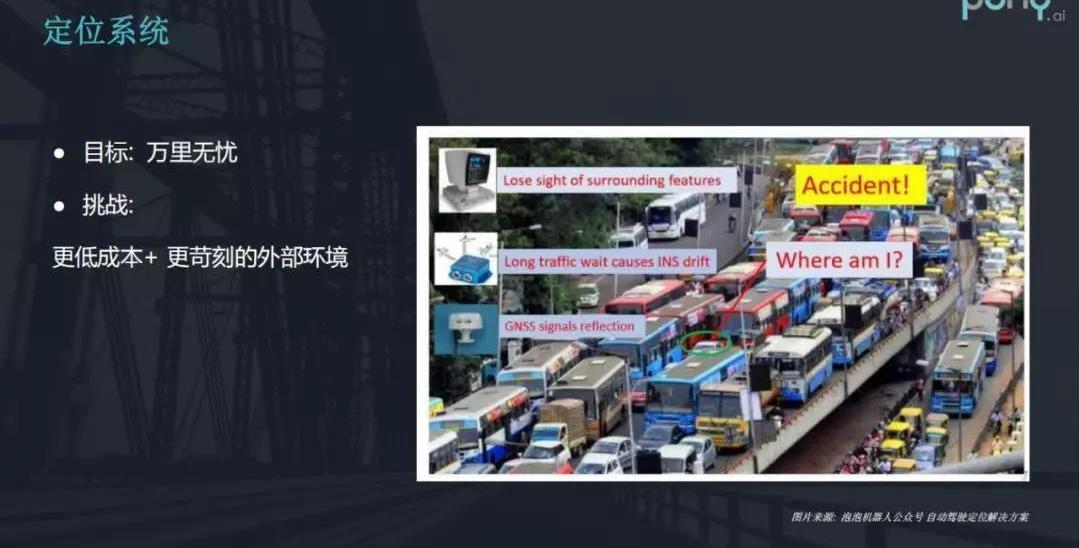
定位系统的最终目的是让万里无忧,而自动驾驶面临的挑战是更低的成本和更苛刻的外部环境。最终解决这些问题,实现这个目标。一般来说,姿态图的优化目标是将整个图离散成点,然后建立一些边约束,最后通过优化一些点的位置来满足边约束。姿态映射也变成了一个优化问题。姿态图的挑战姿态图的整体数学模型看似简单,但有很多细节需要优化:◆如何选择顶点。比如要考虑是不是毫秒的点都要加,GPS信号不好的点要不要加。◆如何保证边缘的准确性?如何建立一个顶点与另一个顶点的相对位置?◆如何求解非线性优化?图建好之后如何做非线性优化?◆如何评价优化效果?是否d……gram是否与真实环境一致以及如何评价结果是否符合要求。◆效率和资源。对于工程来说,数据量如此之大,你需要考虑如何设计工程算法来保证效率和资源。比如考虑是否需要定制和优化算法,如何使用GPU或者分布式计算方法。
我想通过上图右边的例子解释一下姿势图——左边的原图是一个物体在一个球体上来回移动和旋转。通过建立边与边之间的相对约束,优化后,你会发现整个环境被重构为右边一个理想的、完整的球体。总之,我们的工作就是把左图变成右图。迭代最近点算法:保证边缘的约束我们前面提到,姿态图需要保证边缘的约束。为了计算这个约束,业界使用的传统经典算法叫做ICP(迭代最近点算法)。
比如左边有一只红色的兔子,右边有一只蓝色的兔子。现实中两只兔子的位置是一样的,但是在图中两只兔子的位置不一样,说明有偏差。也就是说,输入是A、B两组点云,输出是两组点云之间在空间上的旋转和平移。具体算法的思路大致是:在集合B中寻找点云集合A中每个点的对应点,通过求解最佳刚体变换和迭代优化,最终得到一个收敛解。迎接挑战:消除非静态障碍
去除非静态障碍物的方法有三种:◆概率模型去除。◆点云处理,简单的概率模型是不够的,比如有时候小区路边经常停着车,有时候开走了车。数据采集的时候,车只是停在路边,然后就需要依靠线下的点云处理。◆机器学习,即利用机器学习算法从地图中挖掘出非静态的物体。
上图是去除非静态障碍物前后的简单对比。在处理之前,你会发现在正确的道路上有一些汽车轮廓。当从太空中移除时,地图变得清晰得多。03如何定位自动驾驶定位的自动驾驶车辆特点对于定位系统和传统定位来说,自动驾驶车辆的位置和姿态具有以下特点:◆厘米级的精度需要精确到车辆在车道线内的具体位置,比如距离左右边缘线几厘米。◆高频低延时,要求毫秒级延时,实时传输车辆位置,否则会发生安全事故。几种定位方式的全球导航卫星系统特点:米级精度,低频干扰或遮挡解决方案:RTK(实时运动学)载波相位差技术,可达厘米级。相对定位:IMU特点:加速度计和陀螺仪在加速度和角速度三个方向的高频(一般为100HZ)累积误差。解决方案:惯性导航系统的点云定位是鲁棒的,不依赖于GPS信息。根据先前的地图,地图的准确性和实时性可能会导致定位误差。需要解决:弱特征环境。比如在桥上,向前开10米和向后开10米看到的场景都差不多。对于这种环境,如何找到准确的位置是必须考虑的问题。定位系统的多传感器融合一般来说,仅仅依靠单个传感器进行定位是不够的,所以采用多传感器融合方案。基于卡尔曼滤波模型的整体定位效果将具有更高的精度和更好的鲁棒性。卡尔曼滤波器模型卡尔曼滤波器是一种高效的递归滤波器,它可以从一系列不完全和有噪声的测量值中估计出动态系统的状态。
< img alt = "Di……overy,Man,北京" src = "/ee img/{ HostI }/img/20230304003449321659/17 . jpg "/>
基于卡尔曼滤波模型,我们把自动驾驶车辆当时的位置看成是一个高斯分布,也就是说车辆位于某个区域内,最有可能在中间。随着车辆行驶,定位系统可以根据运动方程预测车辆的位置。假设一辆车向前行驶了10米,那么这辆车就产生了一个预测位置。然而,在实际驾驶中,预测位置和实际位置之间的误差逐渐变大。这是因为这个数据可能是IMU给的,IMU作为传感器自然会有误差。同时,假设车上装有GPS,GPS给出的位置信息相当于上图中的蓝色部分,这个定位数据也包含一定的误差。所以,我们得到了关于这辆车的两个位置信息,通过组合它们,我们可以得到更准确和可信的结果。可以看到卡尔曼滤波器在不断的更新迭代,最终达到获得更精确位置的目的。
定位系统的最终目的是让万里无忧,而自动驾驶面临的挑战是更低的成本和更苛刻的外部环境。最终解决这些问题,实现这个目标。
根据工信部合格证产量数据,2019年6月新能源乘用车产量为112万辆,环比上涨1588,同比大涨9417。
1900/1/1 0:00:00伴随着XmartOS15版本的发布,XPILOT25系统迎来了最重要的一次升级。
1900/1/1 0:00:00(图片来源:asahicomjp)据外媒报道,在上了年纪的司机决定换一辆配备安全功能的汽车,或者上交驾驶证之前,汽车赛车手TakumaKoga希望年老的司机能够首先坐上驾驶模拟器模拟一番。
1900/1/1 0:00:00图片来自“亿欧网”如何把握好快与慢,在技术革新、合规守法和维持燃油车主营业务之间达到最佳平衡点,仍将是最大的考验,对齐普策如此,对宝马如此,对其他车企亦是如此。
1900/1/1 0:00:00当造车新势力相继迈入产品上市、交付阶段后,迎接它们的却是一个严峻的市场环境:2018年中国汽车市场在连续增长28年后迎来首次下跌,2019年上半年也未升温。
1900/1/1 0:00:00图片来自“亿欧网”市场主导,成为后补贴时代首要特征,政策补贴减少将直接推动市场走向优胜劣汰,这考验了一家企业的技术研发能力及产品表现力。
1900/1/1 0:00:00