虽然机器人没有视网膜,但光学相干断层扫描(OCT)机器可以帮助它们更自然、更安全地观察世界并与世界互动。目前,许多机器人公司正在将激光雷达集成到传感器中。激光雷达的工作原理与雷达类似,但它使用的是激光产生的短脉冲光,而不是发射宽带无线电波,寻找反射信号。
(来源:https://wraltechwire.com/)
然而,传统的飞行时间激光雷达存在许多缺点,难以在许多三维视觉应用中使用。因为它需要探测非常微弱的反射光信号,所以很容易受到其他激光雷达系统或者环境中太阳光的干扰。此外,它的深度分辨率也是有限的,比如高速公路或工厂车间等大区域的密集扫描,可能需要很长时间。为了应对这些挑战,研究人员正在转向调频连续波(FMCW)激光雷达。
据国外媒体报道,杜克大学的研究团队展示了从OCT研究中学到的技能,该技术可以将之前的FMCW激光雷达的数据吞吐量提高25倍,同时仍能达到亚毫米深度精度。该校的研究人员展示了一种新的激光雷达方法,该方法可以快速处理数据,以捕捉对自动驾驶汽车和制造系统至关重要的特征。
杜克大学博士生钱若冰说,“FMCW激光雷达的工作原理和OCT一样,生物医学工程领域从上世纪90年代初就开始发展。但在30年前,没有人知道自动驾驶汽车或机器人会成为现实,所以OCT技术专注于组织成像。现在,为了让它在其他新兴领域发挥作用,我们需要利用它的超高分辨率来获得更远的距离和更快的速度。”
OCT是一种光学模拟超声波。它的工作原理是向物体发出声波,然后测量其返回时间。为了计算光波的返回时间,OCT设备测量它们的相位与传播了相同距离但没有与另一个物体相互作用的相同光波相比移动了多少。
FMCW激光雷达采用类似的方法并进行调整。这项技术发射的激光束在不同频率之间不断变化。在收集光线测量其反射时间时,探测器可以从其他光源中分辨出特定的频率模式,这使得在各种光照条件下高速工作成为可能。FMCW激光雷达测量不受阻碍光束的任何相移,这是一种比当前激光雷达系统更精确的确定距离的方法。杜克大学生物医学工程教授约瑟夫·伊扎特(Joseph Izatt)表示,“看到我们研究了几十年的生物细胞成像技术可以直接转化为大规模、实时的3D视觉,这非常令人兴奋。这是机器人安全观察和与人类互动所需要的能力。即使在增强现实中,实时3D视频也可以用来代替虚拟化身。”
之前大部分使用激光雷达的设备都是依靠旋转反射镜来扫描环境中的激光。虽然这种方法是有效的,但它从根本上受到机械镜速度的限制,无论所用的激光有多强。杜克大学的研究人员使用了一种衍射光栅,它的工作原理类似于棱镜,可以将激光分解成彩虹般的频率,这些频率在离开光源时会发生色散。因为原来的激光还在快速扫描一定的频率范围,这就意味着扫描激光雷达光束的速度要比机械镜的转速快很多。这使得系统能够快速覆盖广阔的区域,而不会损失深度和定位精度。
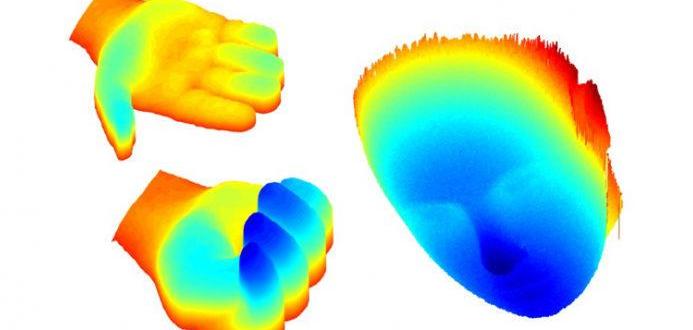
虽然OCT设备用于描述几毫米深的物体的微观结构,但机器人3D视觉系统只需要定位人类大小的物体的表面。为了实现这一目标,研究人员缩小了OCT使用的频率范围,只寻找物体表面产生的峰值信号。这导致系统的分辨率下降,但成像范围和速度比传统的激光雷达大得多。该方法使FMCW激光雷达系统达到亚毫米级定位精度,数据吞吐量比之前演示提高25倍。研究结果表明,该方法能够快速准确地实时捕捉人体运动部位的细节,如点头或握拳。
Izatt说:“我们的愿景是开发新一代3D摄像机……n lidar,速度快,功能强大,可以将3D视觉集成到各种产品中。我们周围的世界是3D的。如果我们希望机器人和其他自动化系统与我们自然安全地交互,我们需要让它们看到我们,就像我们能看到它们一样。"
1虽然机器人没有视网膜,但光学相干断层扫描(OCT)机器可以帮助它们更自然、更安全地观察世界并与世界互动。目前,许多机器人公司正在将激光雷达集成到传感器中。激光雷达的工作原理与雷达类似,但它使用的是激光产生的短脉冲光,而不是发射宽带无线电波,寻找反射信号。
(来源:https://wraltechwire.com/)
然而,传统的飞行时间激光雷达存在许多缺点,难以在许多三维视觉应用中使用。因为它需要探测非常微弱的反射光信号,所以很容易受到其他激光雷达系统或者环境中太阳光的干扰。此外,它的深度分辨率也是有限的,比如高速公路或工厂车间等大区域的密集扫描,可能需要很长时间。为了应对这些挑战,研究人员正在转向调频连续波(FMCW)激光雷达。
据国外媒体报道,杜克大学的研究团队展示了从OCT研究中学到的技能,该技术可以将之前的FMCW激光雷达的数据吞吐量提高25倍,同时仍能达到亚毫米深度精度。该校的研究人员展示了一种新的激光雷达方法,该方法可以快速处理数据,以捕捉对自动驾驶汽车和制造系统至关重要的特征。
杜克大学博士生钱若冰说,“FMCW激光雷达的工作原理和OCT一样,生物医学工程领域从上世纪90年代初就开始发展。但在30年前,没有人知道自动驾驶汽车或机器人会成为现实,所以OCT技术专注于组织成像。现在,为了让它在其他新兴领域发挥作用,我们需要利用它的超高分辨率来获得更远的距离和更快的速度。”
OCT是一种光学模拟超声波。它的工作原理是向物体发出声波,然后测量其返回时间。为了计算光波的返回时间,OCT设备测量它们的相位与传播了相同距离但没有与另一个物体相互作用的相同光波相比移动了多少。
FMCW激光雷达采用类似的方法并进行调整。这项技术发射的激光束在不同频率之间不断变化。在收集光线测量其反射时间时,探测器可以从其他光源中分辨出特定的频率模式,这使得在各种光照条件下高速工作成为可能。FMCW激光雷达测量不受阻碍光束的任何相移,这是一种比当前激光雷达系统更精确的确定距离的方法。杜克大学生物医学工程教授约瑟夫·伊扎特(Joseph Izatt)表示,“看到我们研究了几十年的生物细胞成像技术可以直接转化为大规模、实时的3D视觉,这非常令人兴奋。这是机器人安全观察和与人类互动所需要的能力。即使在增强现实中,实时3D视频也可以用来代替虚拟化身。”
之前大部分使用激光雷达的设备都是依靠旋转反射镜来扫描环境中的激光。虽然这种方法是有效的,但它从根本上受到机械镜速度的限制,无论所用的激光有多强。杜克大学的研究人员使用了一种衍射光栅,它的工作原理类似于棱镜,可以将激光分解成彩虹般的频率,这些频率在离开光源时会发生色散。因为原来的激光还在快速扫描一定的频率范围,这就意味着扫描激光雷达光束的速度要比机械镜的转速快很多。这使得系统能够快速覆盖广阔的区域,而不会损失深度和定位精度。
虽然OCT设备用于描述几毫米深的物体的微观结构,但机器人3D视觉系统只需要定位人类大小的物体的表面。为了实现这一目标,研究人员缩小了OCT使用的频率范围,只寻找物体表面产生的峰值信号。这导致系统的分辨率下降,但成像范围和速度比传统的激光雷达大得多。这种方法使得FMCW激光雷达系统能够达到亚毫米级……定位精度,数据吞吐量是之前演示的25倍。研究结果表明,该方法能够快速准确地实时捕捉人体运动部位的细节,如点头或握拳。
伊扎特说,“我们的愿景是开发基于激光雷达的新一代3D相机,它速度快,功能强,可以将3D视觉集成到各种产品中。我们周围的世界是3D的。如果我们希望机器人和其他自动化系统与我们自然、安全地互动,我们需要让它们看到我们,就像我们能看到它们一样。”

标签:世纪
作者编辑部编辑王鑫来源汽车预言家从超跑到高端SUV,从燃油车到电动车,从传统车到新汽车,百年路特斯迎来历史性的大转折。
1900/1/1 0:00:00作者张坤编辑王鑫来源汽车预言家3月30日凌晨,路特斯在英国发布了旗下的首款电动SUV产品Eletre。
1900/1/1 0:00:001、受疫情影响自游家NV上市发布会延期举办3月30日,自游家NIUTRON官方发布消息,由于疫情升级的原因,原定于3月31日晚的自游家NV上市发布会,将延期举行,具体发布时间待定。
1900/1/1 0:00:00日前,蜂巢能源与巴斯夫杉杉战略投资湖南永杉锂业有限公司(简称“永杉锂业”),并通过线上方式举行签约仪式。签约后,蜂巢能源与巴斯夫杉杉作为永杉锂业的股东将各自持有后者10股权。
1900/1/1 0:00:00盖世汽车讯现在,消费者日益青睐搭载先进悬架系统的卡车和越野车,这些系统具有良好的道路操作性,在各种越野环境中也能提供更出色的性能和灵活性。这一趋势适用于内燃机和纯电动汽车。
1900/1/1 0:00:00作者王一萍编辑王鑫来源汽车预言家3月21日,据日本共同社报道,三菱日联摩根士丹利证券公司日前汇总估算数据显示,鉴于日美欧的制裁造成俄罗斯经济动荡,
1900/1/1 0:00:00