如今,泊车雷达不再是高不可攀的高端配置,几乎所有价位的车型都会配备,但雷达探头的数量有所不同。无论是新手还是老司机,停车雷达的出现大大降低了停车的难度,同时也可以减少盲点造成的小摩擦。虽然停车雷达探头并不起眼,但这项技术可以在民用汽车上推广,这也是由于军事技术的发展。

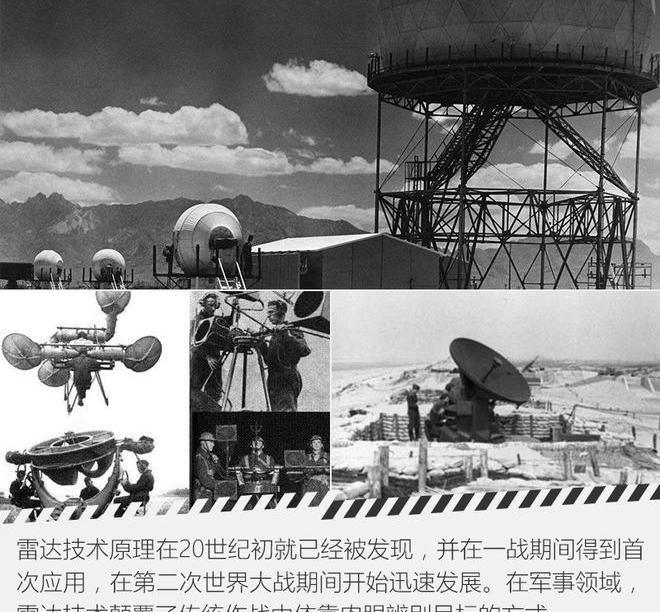
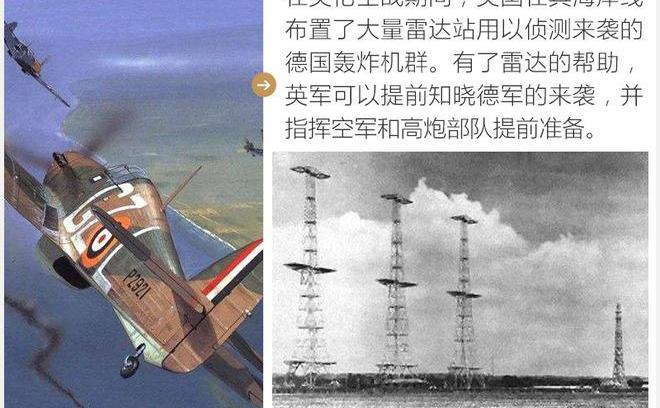
除了我们熟悉的倒车雷达探头之外,雷达技术在汽车上的应用实际上远比我们想象的要广泛。例如,一些车型配备的ACC自适应巡航系统也需要雷达传感器的帮助。进一步延伸,各大厂商现在推崇的自动驾驶技术也离不开雷达传感器的支持。当然,根据不同的工作模式,车载雷达传感器有很多分类。在介绍之前,让我们先了解一下雷达技术的起源。“偷窥”起源于第二次世界大战期间。在20世纪30年代和40年代,由于二战参与国大规模使用飞机、大炮和其他武器,雷达技术也得到了迅速发展。英国率先将雷达投入实战,对德国轰炸机群进行预警和探测。后来,机载雷达和火炮雷达相继出现。
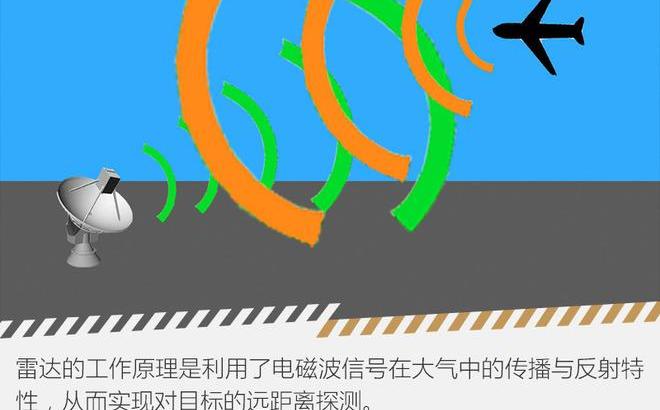
作为一种探测方法,对雷达技术的简单理解是,电磁波通过发射器发射到特定区域,当电磁波遇到物体(被探测的目标)时,它会被散射,部分电磁波会被反射回来,然后被接收器捕获。由于电磁波发射器的位置和电磁波的传播速度是已知的,因此仅通过计算返回信号的时间差就可以获得检测到的目标的方位角、距离和高度等信息。
与传统的光学探测(肉眼、望远镜、探照灯等)相比,雷达的探测距离更长,电磁波在大气中的穿透力较强,不受天气、光照条件等客观因素的限制。这一特点深受军事领域的欢迎,因此雷达技术在第二次世界大战中后期得到了广泛应用并不断发展。以下是第二次世界大战期间雷达技术应用的几个例子:


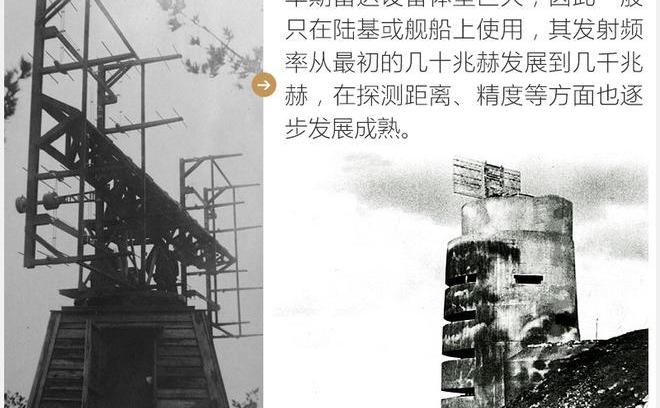
在战争后期,随着成像技术的出现,雷达的探测效率和精度得到了进一步的发展。同时,雷达设备的小型化使其能够安装在飞机和其他设备上,其应用范围进一步扩大。经过战争的洗礼,雷达技术在战后迅速发展,成为现代军事装备不可或缺的一部分。当然,除了军事领域,雷达技术在民用领域也发挥着重要作用,如天气雷达、雷达导航系统和测速雷达,当然也包括在汽车领域的应用。普通的汽车雷达技术呢?随着雷达技术的不断发展和成熟,有超声波雷达、毫米波雷达和激光雷达等不同的分类,但它们的主要工作原理是利用信号发射和反射现象来探测周围物体。在汽车领域,目前已经应用的车载雷达技术包括超声波雷达、红外雷达、毫米波雷达和激光雷达,它们自身的特点不同,因此应用场景也不同。

超声波雷达(辅助驻车传感器/倒车雷达)超声波雷达……
s主要用于驻车雷达传感器,已成为大多数车辆必备的实用配置之一。超声波雷达根据用途的不同分为UPA和APA。前者是我们停车时经常使用的障碍物检测传感器,它经常被布置在前后保险杠上。后者主要用于自动泊车和并线辅助,一般布置在车辆侧面的轮眉处。
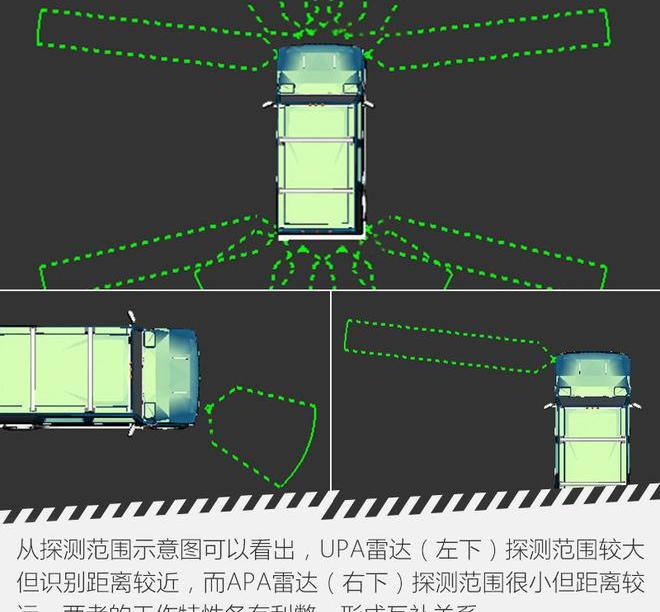
超声波雷达虽然成本低、体积小,但探测距离相对较近,超声波在不同湿度和温度环境下的响应速度变化较大,不适合高速探测。此外,超声波雷达传感器只能识别障碍物的大致位置,无法实现更精确的测量,这也是超声波雷达目前无法用于自动驾驶的主要原因。红外雷达传感器(夜视辅助系统)在自动驾驶技术普及之前,一些高端车型使用红外雷达传感器来帮助提高驾驶员对前方障碍物的感知,即车载夜视系统。根据工作原理的不同,红外雷达传感器分为主动型和被动型。其中,主动红外雷达配备了红外发射源和接收装置,可以在夜间低光环境下发现远处的道路障碍物。被动红外雷达仅依靠一套红外接收器来分析外部物体反射的红外信号源,识别精度和距离相对较差。
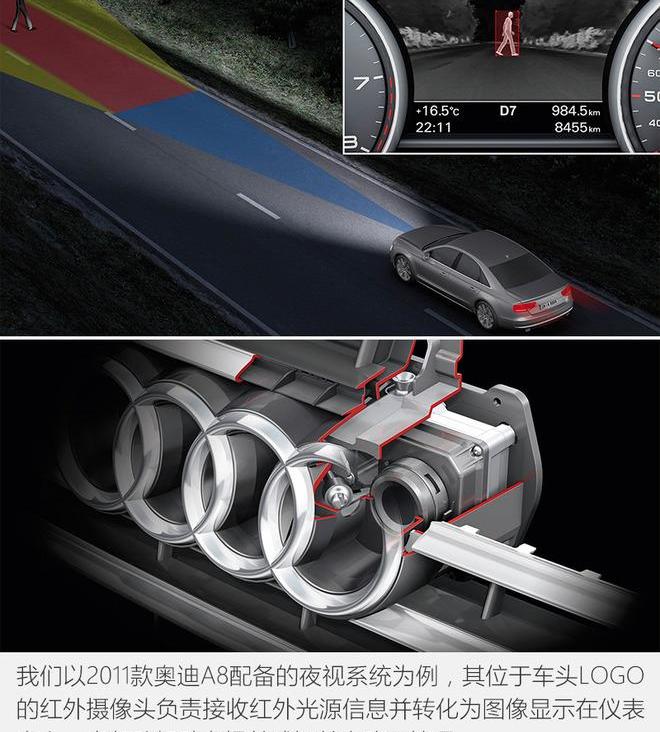
虽然红外雷达传感器在昏暗的环境中有很多优点,但由于其对红外信号的依赖性,在白天和阳光下很容易受到外部红外光源的干扰,因此不具备全天候工作能力。此外,红外雷达传感器的有效探测距离相对较近,不能完全满足自动驾驶技术的要求。毫米波雷达(ACC自适应巡航)在停车雷达和红外雷达等“入门技术”的铺垫下,民用汽车越来越容易驾驶。接下来,汽车工程师开始让汽车变得更智能,减轻司机的负担。在这样的需求背景下,毫米波雷达开始出现在汽车中,并帮助我们实现了ACC自适应巡航等驾驶辅助功能。
0
目前,车载毫米波雷达主要为77G规格,其电磁波长约为4mm,主要用于中远程测距和探测。众所周知,空气中灰尘颗粒和雨水的大小通常小于4毫米,因此毫米波雷达在工作时不会受到这些外部因素的干扰,可以实现全天候工作能力。
1
与上面介绍的超声波雷达相比,毫米波雷达不仅可以检测障碍物的例子,还可以大致识别物体的轮廓。简而言之,毫米波雷达可以识别障碍物是人还是车,因此其检测精度更高,可以实现更复杂的辅助功能,如自动跟车和自动制动。
2
当然,毫米波雷达也有其自身的局限性。由于电磁波在遇到障碍物后会散射,如果两个障碍物很近,毫米波雷达就会“看起来”成为一个巨大的障碍物。即便如此,毫米波雷达技术在未来仍有很大的发展潜力,在自动驾驶技术中发挥着非常重要的基础作用。雷达技术和自动驾驶的未来如上所述,雷达技术在汽车领域发挥着越来越重要的作用。现在是时候展望雷达和汽车技术的未来发展了。在毫米波雷达的帮助下,我们的汽车已经能够实现有限的“自动驾驶”功能,如自适应巡航、车道保持和自动制动。然而,这些都属于驾驶辅助的范畴,与r…还有很大差距……
l自动驾驶。
3
为了进一步提高车辆感知周围事物的能力,工程师们引入了更先进(昂贵)的激光雷达设备。与毫米波雷达相比,激光扫描在探测精度上更为出色,甚至可以清晰地勾勒出周围景物的详细轮廓。目前,许多科技公司都在使用激光雷达测试无人车,甚至有人认为激光雷达是实现自动驾驶的必要技术之一。
4
就像所有新兴事物一样,激光雷达在现阶段也有其自身的缺点,因此无法大规模商业化。主要原因如下:
5
6
7
受各种主客观因素的限制,激光雷达仍然是一种实验技术。然而,在高精度探测能力的诱惑下,许多制造商仍致力于开发激光雷达自动驾驶技术。全文摘要
8
车载雷达技术作为汽车感知周围事件的重要基础,不仅使我们的汽车生活更加便利,而且对自动驾驶的发展起到了基础作用。如今,泊车雷达不再是高不可攀的高端配置,几乎所有价位的车型都会配备,但雷达探头的数量有所不同。无论是新手还是老司机,停车雷达的出现大大降低了停车的难度,同时也可以减少盲点造成的小摩擦。虽然停车雷达探头并不起眼,但这项技术可以在民用汽车上推广,这也是由于军事技术的发展。
除了我们熟悉的倒车雷达探头之外,雷达技术在汽车上的应用实际上远比我们想象的要广泛。例如,一些车型配备的ACC自适应巡航系统也需要雷达传感器的帮助。进一步延伸,各大厂商现在推崇的自动驾驶技术也离不开雷达传感器的支持。当然,根据不同的工作模式,车载雷达传感器有很多分类。在介绍之前,让我们先了解一下雷达技术的起源。“偷窥”起源于第二次世界大战期间。在20世纪30年代和40年代,由于二战参与国大规模使用飞机、大炮和其他武器,雷达技术也得到了迅速发展。英国率先将雷达投入实战,对德国轰炸机群进行预警和探测。后来,机载雷达和火炮雷达相继出现。
作为一种探测方法,对雷达技术的简单理解是,电磁波通过发射器发射到特定区域,当电磁波遇到物体(被探测的目标)时,它会被散射,部分电磁波会被反射回来,然后被接收器捕获。由于电磁波发射器的位置和电磁波的传播速度是已知的,因此仅通过计算返回信号的时间差就可以获得检测到的目标的方位角、距离和高度等信息。
与传统的光学探测(肉眼、望远镜、探照灯等)相比,雷达的探测距离更长,电磁波在大气中的穿透力较强,不受天气、光照条件等客观因素的限制。这一特点深受军事领域的欢迎,因此雷达技术在第二次世界大战中后期得到了广泛应用并不断发展。以下是世界上雷达技术应用的几个例子……
第二部分:
在战争后期,随着成像技术的出现,雷达的探测效率和精度得到了进一步的发展。同时,雷达设备的小型化使其能够安装在飞机和其他设备上,其应用范围进一步扩大。经过战争的洗礼,雷达技术在战后迅速发展,成为现代军事装备不可或缺的一部分。当然,除了军事领域,雷达技术在民用领域也发挥着重要作用,如天气雷达、雷达导航系统和测速雷达,当然也包括在汽车领域的应用。普通的汽车雷达技术呢?随着雷达技术的不断发展和成熟,有超声波雷达、毫米波雷达和激光雷达等不同的分类,但它们的主要工作原理是利用信号发射和反射现象来探测周围物体。在汽车领域,目前已经应用的车载雷达技术包括超声波雷达、红外雷达、毫米波雷达和激光雷达,它们自身的特点不同,因此应用场景也不同。
超声波雷达(辅助驻车传感器/倒车雷达)超声波雷达主要用于驻车雷达传感器,已成为大多数车辆必备的实用配置之一。超声波雷达根据用途的不同分为UPA和APA。前者是我们停车时经常使用的障碍物检测传感器,它经常被布置在前后保险杠上。后者主要用于自动泊车和并线辅助,一般布置在车辆侧面的轮眉处。
超声波雷达虽然成本低、体积小,但探测距离相对较近,超声波在不同湿度和温度环境下的响应速度变化较大,不适合高速探测。此外,超声波雷达传感器只能识别障碍物的大致位置,无法实现更精确的测量,这也是超声波雷达目前无法用于自动驾驶的主要原因。红外雷达传感器(夜视辅助系统)在自动驾驶技术普及之前,一些高端车型使用红外雷达传感器来帮助提高驾驶员对前方障碍物的感知,即车载夜视系统。根据工作原理的不同,红外雷达传感器分为主动型和被动型。其中,主动红外雷达配备了红外发射源和接收装置,可以在夜间低光环境下发现远处的道路障碍物。被动红外雷达仅依靠一套红外接收器来分析外部物体反射的红外信号源,识别精度和距离相对较差。
虽然红外雷达传感器在昏暗的环境中有很多优点,但由于其对红外信号的依赖性,在白天和阳光下很容易受到外部红外光源的干扰,因此不具备全天候工作能力。此外,红外雷达传感器的有效探测距离相对较近,不能完全满足自动驾驶技术的要求。毫米波雷达(ACC自适应巡航)在停车雷达和红外雷达等“入门技术”的铺垫下,民用汽车越来越容易驾驶。接下来,汽车工程师开始让汽车变得更智能,减轻司机的负担。在这样的需求背景下,毫米波雷达开始出现在汽车中,并帮助我们实现了ACC自适应巡航等驾驶辅助功能。
0
目前,车载毫米波雷达主要为77G规格,其电磁波长约为4mm,主要用于测距和探测……
在中距离和长距离上。众所周知,空气中灰尘颗粒和雨水的大小通常小于4毫米,因此毫米波雷达在工作时不会受到这些外部因素的干扰,可以实现全天候工作能力。
1
与上面介绍的超声波雷达相比,毫米波雷达不仅可以检测障碍物的例子,还可以大致识别物体的轮廓。简而言之,毫米波雷达可以识别障碍物是人还是车,因此其检测精度更高,可以实现更复杂的辅助功能,如自动跟车和自动制动。
2
当然,毫米波雷达也有其自身的局限性。由于电磁波在遇到障碍物后会散射,如果两个障碍物很近,毫米波雷达就会“看起来”成为一个巨大的障碍物。即便如此,毫米波雷达技术在未来仍有很大的发展潜力,在自动驾驶技术中发挥着非常重要的基础作用。雷达技术和自动驾驶的未来如上所述,雷达技术在汽车领域发挥着越来越重要的作用。现在是时候展望雷达和汽车技术的未来发展了。在毫米波雷达的帮助下,我们的汽车已经能够实现有限的“自动驾驶”功能,如自适应巡航、车道保持和自动制动。然而,这些都属于驾驶辅助的范畴,与真正的自动驾驶还有很大差距。
3
为了进一步提高车辆感知周围事物的能力,工程师们引入了更先进(昂贵)的激光雷达设备。与毫米波雷达相比,激光扫描在探测精度上更为出色,甚至可以清晰地勾勒出周围景物的详细轮廓。目前,许多科技公司都在使用激光雷达测试无人车,甚至有人认为激光雷达是实现自动驾驶的必要技术之一。
4
就像所有新兴事物一样,激光雷达在现阶段也有其自身的缺点,因此无法大规模商业化。主要原因如下:
5
6
7
受各种主客观因素的限制,激光雷达仍然是一种实验技术。然而,在高精度探测能力的诱惑下,许多制造商仍致力于开发激光雷达自动驾驶技术。全文摘要
8
车载雷达技术作为汽车感知周围事件的重要基础,不仅使我们的汽车生活更加便利,而且对自动驾驶的发展起到了基础作用。
随着车市跌宕起伏,上市车企的利润分化愈加明显。
1900/1/1 0:00:00今年5月,空姐顺风车遇害事件后,滴滴对顺风车业务进行了整改,结果仅仅3个月,又发生了乐清顺风车事件。作为共享经济硕果仅存的跟共享多少还沾点边的一项业务,顺风车的前景也因此变得一片黯淡。
1900/1/1 0:00:00据澳媒报道,近日,有关无人驾驶公交车的研究与试验有了新突破。澳大利亚拉筹伯大学LaTrobeUniversity在其校园开展了为期12个月的无人驾驶公交车试运营。
1900/1/1 0:00:00《中华人民共和国车辆购置税法(草案)》27日提请全国人大常委会审议,维持10税率不变。
1900/1/1 0:00:00和10年前相比,现在已经很少有人用“汽车疯子”来形容李书福了。这并非因为他不如以前那般“疯狂”,而是因为,很多之前被认为疯狂的说法和做法,最后都变成了现实。
1900/1/1 0:00:00特斯拉首席执行官埃隆马斯克日前表态取消私有化(退市)计划,业界人士警告称,特斯拉可能因此面临更多监管调查和市场考验。
1900/1/1 0:00:00