自动驾驶汽车的激光雷达传感器会发出红外脉冲,并测量它们从物体上反弹的时间。该传感器创建一个点云,并建立汽车周围环境的3D快照,从而帮助车辆行驶。理解原始的点云数据是非常困难的,而在机器学习时代到来之前,训练有素的工程师需要明确自己想要手动捕捉的特征。据国外媒体报道,麻省理工学院计算机科学和人工智能实验室(CSAIL)的研究人员最近发表了一系列论文,表明深度学习可以用于自动处理3D成像应用中的点云。
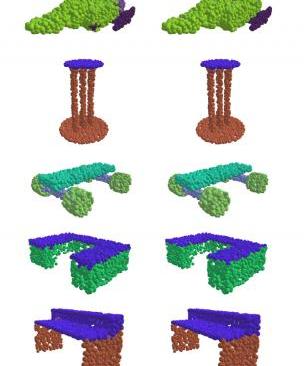
(图片来源:麻省理工学院)论文高级作者之一、麻省理工学院教授贾斯汀·所罗门(Justin Solomon)表示,“目前,90%的计算机视觉和机器学习只涉及2D图像。我们的工作旨在帮助更好地表现3D世界,它不仅限于自动驾驶应用,还包括所有需要理解3D形状的领域。”在过去,大多数方法在从数据中获得点云的模式方面不是特别成功,而从空间中的3D点获得有用的信息是必要的。在该团队的一篇论文中,研究人员展示了他们分析点云的方法EdgeConv,该方法可以通过使用动态图卷积神经网络对单个对象进行分类和分割。丰田研究所的机器学习科学家Wadim Kehl表示,“该算法可以通过构建相邻点的图形来捕捉层次模式,从而推断出各种类型的一般信息,可供各种下游任务使用。”此外,团队还研究了点云处理的其他方面。例如,大多数传感器在3D世界中移动时会改变其视角。每次他们再次扫描同一个物体时,物体的位置可能与他们上次看到的不同。要将多个点云合并成一个详细的世界视图,需要对齐多个3D点,这个过程称为“配准”。该论文的作者之一王月博士说:“注册使我们能够将不同来源的3D数据整合到一个通用的坐标系中。否则,我们无法从这些方法中获得有意义的信息。”Solomon和Wang的第二篇论文演示了一种新的配准算法,称为DCP(深度最近点),它可以更好地找到点云的可识别模式、点和边缘,以便与其他点云对齐。这对于自主车辆确定它们在环境中的位置(定位)尤其重要。DCP的一个局限性是,它假设您可以看到整个形状,而不仅仅是一面。这意味着DCP不能对齐对象形状的部分视图(称为“部分对部分配准”)。因此,在第三篇论文中,研究人员提出了一种叫做部分注册网络(PRNet)的改进算法。所罗门说,与2D图像和照片相比,现有的3D数据往往相当混乱和无组织。所罗门的团队试图在没有大量机器学习技术的受控环境下,从混乱的3D数据中获得有意义的信息。DCP和PRNet表明,点云处理的一个关键方面是上下文。将点云A与点云B对齐所需的几何特征可能不同于对齐点云C所需的几何特征..例如,在部分配准中,一个点云的形状的一部分在其他点云上可能不可见,因此不能用于配准。王说,该团队的工具已经被计算机视觉和其他领域的许多研究人员使用。接下来,研究人员希望将这些算法应用于现实世界的数据,包括从自动驾驶汽车收集的数据。王还表示,他们还计划使用自我监督学习来探索训练系统的潜力,从而最大限度地减少对人类评论的需求。自动驾驶汽车的激光雷达传感器会发出红外脉冲,并测量它们从物体上反弹的时间。该传感器创建一个点云,并建立汽车周围环境的3D快照,从而帮助车辆行驶。理解原始的点云数据是非常困难的,而在机器学习时代到来之前,训练有素的工程师需要明确自己想要手动捕捉的特征。据国外媒体报道,麻省理工学院计算机科学和人工智能实验室(CSAIL)的研究人员最近发表了一系列论文,表明深度学习可以用于自动处理点……3D成像应用中的ouds。
(图片来源:麻省理工学院)论文高级作者之一、麻省理工学院教授贾斯汀·所罗门(Justin Solomon)表示,“目前,90%的计算机视觉和机器学习只涉及2D图像。我们的工作旨在帮助更好地表现3D世界,它不仅限于自动驾驶应用,还包括所有需要理解3D形状的领域。”在过去,大多数方法在从数据中获得点云的模式方面不是特别成功,而从空间中的3D点获得有用的信息是必要的。在该团队的一篇论文中,研究人员展示了他们分析点云的方法EdgeConv,该方法可以通过使用动态图卷积神经网络对单个对象进行分类和分割。丰田研究所的机器学习科学家Wadim Kehl表示,“该算法可以通过构建相邻点的图形来捕捉层次模式,从而推断出各种类型的一般信息,可供各种下游任务使用。”此外,团队还研究了点云处理的其他方面。例如,大多数传感器在3D世界中移动时会改变其视角。每次他们再次扫描同一个物体时,物体的位置可能与他们上次看到的不同。要将多个点云合并成一个详细的世界视图,需要对齐多个3D点,这个过程称为“配准”。该论文的作者之一王月博士说:“注册使我们能够将不同来源的3D数据整合到一个通用的坐标系中。否则,我们无法从这些方法中获得有意义的信息。”Solomon和Wang的第二篇论文演示了一种新的配准算法,称为DCP(深度最近点),它可以更好地找到点云的可识别模式、点和边缘,以便与其他点云对齐。这对于自主车辆确定它们在环境中的位置(定位)尤其重要。DCP的一个局限性是,它假设您可以看到整个形状,而不仅仅是一面。这意味着DCP不能对齐对象形状的部分视图(称为“部分对部分配准”)。因此,在第三篇论文中,研究人员提出了一种叫做部分注册网络(PRNet)的改进算法。所罗门说,与2D图像和照片相比,现有的3D数据往往相当混乱和无组织。所罗门的团队试图在没有大量机器学习技术的受控环境下,从混乱的3D数据中获得有意义的信息。DCP和PRNet表明,点云处理的一个关键方面是上下文。将点云A与点云B对齐所需的几何特征可能不同于对齐点云C所需的几何特征..例如,在部分配准中,一个点云的形状的一部分在其他点云上可能不可见,因此不能用于配准。王说,该团队的工具已经被计算机视觉和其他领域的许多研究人员使用。接下来,研究人员希望将这些算法应用于现实世界的数据,包括从自动驾驶汽车收集的数据。王还表示,他们还计划使用自我监督学习来探索训练系统的潜力,从而最大限度地减少对人类评论的需求。
标签:丰田
TOYOTA、上汽以及国家新能源汽车技术创新中心自主电子架构的开发对比CASE(连接,自治,共享,电气)系统的开发正在加速,许多系统开发正在经历从原型阶段转向批量生产的阶段。
1900/1/1 0:00:00自动驾驶是汽车进化的重大变革之一,而另一大变革则是汽车将拥有与周围环境的“对话”能力。未来的汽车不仅能够实现车与车之间的沟通,还能进行车与路的协同。
1900/1/1 0:00:00特斯拉2019财年第三季度财报日前正式发布,该企业第三季度来自汽车销售业务的营收为5132亿美元,同比降低1269。
1900/1/1 0:00:0010月25日,尽管美国电动汽车制造商特斯拉的长期前景仍然存疑,但由于其CEO埃隆马斯克(ElonMusk)关于第三季度盈利的承诺令华尔街颇感意外,推动该股周四暴涨17。
1900/1/1 0:00:00由中共西安市委、西安市人民政府主办,西安市工业和信息化局承办的2019(第四届)国际丝路新能源汽车大会将于10月3031日在西安曲江宾馆举办。
1900/1/1 0:00:00图片来自“亿欧网”产业间互利共生、协同成长、创新驱动已经成为全球共识与发展趋势。
1900/1/1 0:00:00