对于所有谈论自动驾驶的人来说,自动驾驶的水平几乎是一个无法回避的词。LL0到5这六个等级,就像考试成绩一样,代表着自动驾驶水平从低到高。从业者和局外人都在用这个标准来理解和区分复杂的自动驾驶系统。然而,这套出版了几年,至今已更新到第三版的自动化系统分类和定义标准,涵盖的范围远不止简单的六个等级,它还为同级别系统之间的比较提供了一种参考方法。其中,比较重要的三个参数是设计驾驶区域(ODD)、动态驾驶任务(DDT)和动态驾驶任务支持(DDT Fallback)。为什么同级别的自动驾驶系统会有巨大差异?为什么不同等级系统之间的实际体验与等级不完全一致?通过这三个要素的对比,很多可以一窥端倪。
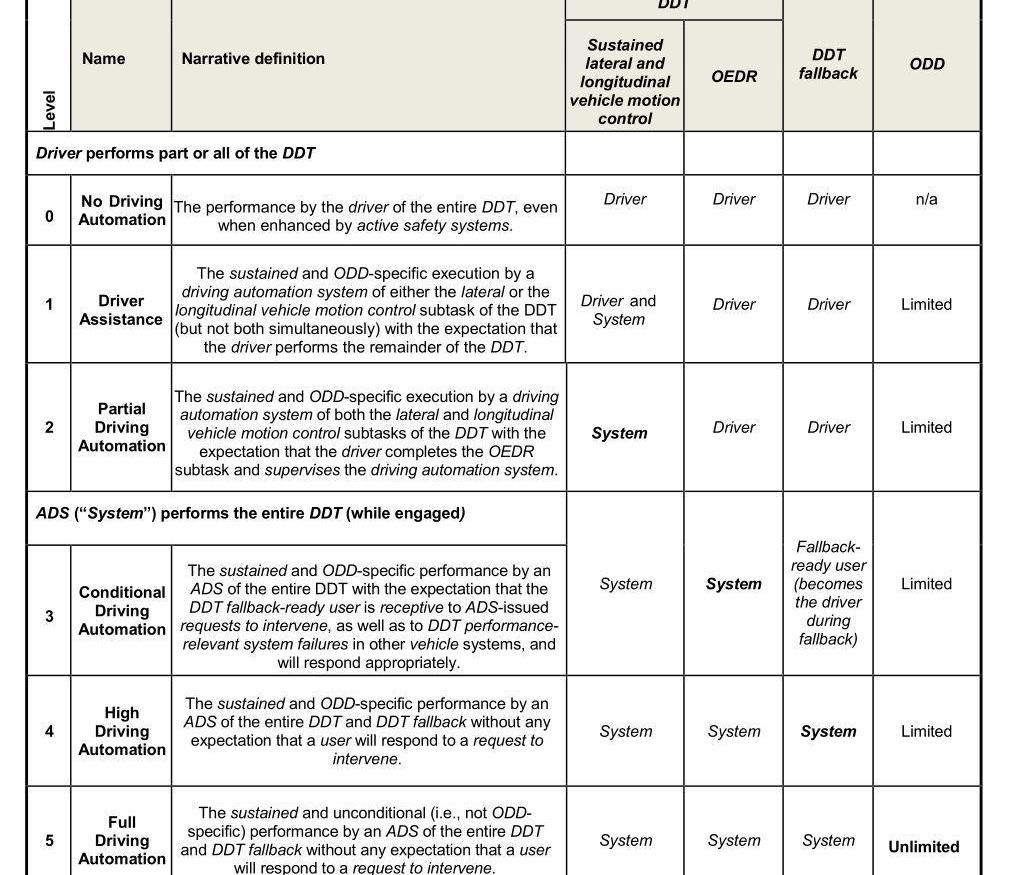
*截图来自SAE J3016《道路机动车自动驾驶系统相关术语的分类和定义》。如果再对比一下硬件和成本,就可以相对客观地区分一个自动驾驶系统的“水平”了。值得一提的是,已经量产或短期内即将量产的自动驾驶功能,仍然属于有限条件或场景下的自动驾驶,属于L2-L4级别,并不是完全无限制的无人驾驶。这些功能的实际效果也与上面提到的三个要素密切相关。那么,什么样的自动驾驶方案是可以的呢?我们从这四个方面来看一下。设计驾驶区ODD称为运营设计域,即设计驾驶区指的是自动驾驶汽车的安全工作环境。通常包括车辆自动驾驶时的速度、地形、路况、环境、交通状况、时间段等等。简而言之,ODD就是自动驾驶的适用范围。因为高速或低速,平原或山地,直道或弯路,天气,基础设施,简单或复杂的交通,是在白天还是在晚上……所有这些条件都会对自动驾驶的性能起到决定性的作用。

ODD是否全面细致,一定程度上可以反映出自动驾驶方案是否成熟;ODD设置的条件是否宽松,也能在一定程度上反映出同级方案的水平。如果只能在严格限制的范围内使用,车辆的“智能化”程度可能比较低,实际使用的场景相对较少,体验略差。目前市面上L2+及以上的自动驾驶方案中,对车道线状况、车速区间、驾驶员手持方向盘都有不同程度的限制,这些方面的体验还有待进一步提升。比如有些车辆只能在高速路段和限速范围内开启功能,或者要求路段覆盖高精地图,驾驶员握着方向盘,那么其自动驾驶的应用范围就比较差。比如Nullmax前装方案中的高速行驶和跟车功能,因为不依赖高精地图,允许驾驶员离开方向盘,支持全速开启,所以体验性和通用性都很好。动态驾驶任务(Dynamic Driving Task,DDT)全称是动态驾驶任务,是指车辆在道路上行驶时需要做出的操作和决策,包括车辆横向和纵向运动方向上的操作、车辆周围环境的监控以及相应的操作等等。简单来说,DDT可以理解为自动驾驶方案实现的几个特定功能。在量产的辅助驾驶和自动驾驶车型中,常见的跟驰驾驶、自适应巡航和紧急制动,以及少数车型的换挡杆和主动超车都是典型的动态驾驶任务。

但是,即使是同名的功能,由于技术指标不同,性能也不一样。以弯道车道保持为例。有些车辆只能应付一些不太急的弯道。比如遇到半径小于250m的弯道,很可能需要司机来控制。在Nullmax方案中,车辆可以支持曲率小得多的曲线,并支持自动合并。再比如变速杆变道。有些车型要求驾驶员确认路况,有些则要求变速杆在变道时达到一定速度以上。但对于不支持变速杆变道的车辆,驾驶员需要转动方向盘才能变道。在Nullmax的方案中,车辆可以在驾驶员拨杆后判断路况,决定变道时间。除了市场上可见的这些功能,自动驾驶还可以完成很多其他的DDT,比如侧向避让。一般来说,汽车的车道保持通常设定在车道的中心线上。但考虑到相邻车道可能存在不规则行驶,让车辆在安全距离内暂时偏离车道中心线,避开侧压车辆,可以有效降低危险,提高用户体验。这是Nullmax方案中的一个特征函数。动态驾驶任务支持DDT Fallback全称动态驾驶任务回退,意思是动态驾驶任务支持。这意味着在设计自动驾驶系统时,应考虑系统故障或超出系统运行设计范围的情况,并给出最小化风险的路径。在目前的量产方案中,分级预警是常见的DDT回退操作。虽然各家的最小风险状态设计不一样,但减速停车是一个通用的设计。除此之外,还有爬行状态、紧急呼叫等其他处理机制。

以Nullmax的方案为例,当系统检测到司机需要接管时,会分层次给出接管提示。如果司机在限定时间内没有回复一级提示,将会发出二级提示,提示的强度将会全面升级。如果车辆逾期未接管,车辆将进入最小风险状态,减速停车。此外,Nullmax的方案还可以配备一个运营中心,以支持驾驶过程中遇到的各种情况,包括处理来自车辆的紧急呼叫。硬件和成本受到车辆法规和成本问题的限制。在……之前nt,激光雷达只在少数量产车型中使用,而主流的自动驾驶量产方案仍然使用成熟的摄像头、毫米波雷达、超声波雷达等硬件。计算平台的选择也是如此。除了性能,还需要满足车辆分级标准,控制成本。
目前常见的自驾产品,功能和侧重点都不一样,所以有的车型会比较稳健保守,有的车型会比较激进。总的来说,功能越丰富、越智能,对硬件配置要求越高,成本也越高。正是考虑到这些因素,Nullmax的预装方案才能根据需求提供不同的硬件配置。车辆可选择高端配置实现所有功能,硬件成本控制在1万元以内;还可以选择基于低成本芯片的经济型配置,实现按需定制功能,大幅降低硬件成本。此外,在充分挖掘软硬件潜力的情况下,车辆也可以用更好的成本达到同样的体验。比如在Nullmax的一些定制方案中,通过角度雷达和传感器的融合,可以实现侧面后方和前方的障碍物感知,而不需要使用全景摄像头。目前市场上各种L2+及以上级别的自驾套装价格大多在数万元区间,实际体验不一。虽然有很多相似之处,但也有很多不同之处。自动驾驶汽车非常复杂,仅仅用L0-L5的等级来区分和判断是不够全面的。如果结合产品的适用范围、核心功能、动态驾驶任务支持、硬件配置、成本等因素,可以相对客观地判断一个方案的“好坏”。对于所有谈论自动驾驶的人来说,自动驾驶的水平几乎是一个无法回避的词。LL0到5这六个等级,就像考试成绩一样,代表着自动驾驶水平从低到高。从业者和局外人都在用这个标准来理解和区分复杂的自动驾驶系统。然而,这套出版了几年,至今已更新到第三版的自动化系统分类和定义标准,涵盖的范围远不止简单的六个等级,它还为同级别系统之间的比较提供了一种参考方法。其中,比较重要的三个参数是设计驾驶区域(ODD)、动态驾驶任务(DDT)和动态驾驶任务支持(DDT Fallback)。为什么同级别的自动驾驶系统会有巨大差异?为什么不同等级系统之间的实际体验与等级不完全一致?通过这三个要素的对比,很多可以一窥端倪。
*截图来自SAE J3016《道路机动车自动驾驶系统相关术语的分类和定义》。如果再对比一下硬件和成本,就可以相对客观地区分一个自动驾驶系统的“水平”了。值得一提的是,已经量产或短期内即将量产的自动驾驶功能,仍然属于有限条件或场景下的自动驾驶,属于L2-L4级别,并不是完全无限制的无人驾驶。这些功能的实际效果也与上面提到的三个要素密切相关。那么,什么样的自动驾驶方案是可以的呢?我们从这四个方面来看一下。设计驾驶区ODD称为运营设计域,即设计驾驶区指的是自动驾驶汽车的安全工作环境。通常包括车辆自动驾驶时的速度、地形、路况、环境、交通状况、时间段等等。简而言之,ODD就是自动驾驶的适用范围。因为高速或低速,平原或山地,直道或弯路,天气,基础设施,简单或复杂的交通,是在白天还是在晚上……所有这些条件都会对自动驾驶的性能起到决定性的作用。
ODD是否全面细致,一定程度上可以反映出自动驾驶方案是否成熟;ODD设置的条件是否宽松,也能在一定程度上反映出同级方案的水平。如果只能在严格限制的范围内使用,车辆的“智能化”程度可能比较低,实际使用的场景相对较少,体验略差。目前市面上L2+及以上的自动驾驶方案中,对车道线状况、车速区间、驾驶员手持方向盘都有不同程度的限制,这些方面的体验还有待进一步提升。比如有些车辆只能在高速路段和限速范围内开启功能,或者要求路段覆盖高精地图,驾驶员握着方向盘,那么其自动驾驶的应用范围就比较差。比如Nullmax前装方案中的高速行驶和跟车功能,因为不依赖高精地图,允许驾驶员离开方向盘,支持全速开启,所以体验性和通用性都很好。动态驾驶任务(Dynamic Driving Task,DDT)全称是动态驾驶任务,是指车辆在道路上行驶时需要做出的操作和决策,包括车辆横向和纵向运动方向上的操作、车辆周围环境的监控以及相应的操作等等。简单来说,DDT可以理解为自动驾驶方案实现的几个特定功能。在量产的辅助驾驶和自动驾驶车型中,常见的跟驰驾驶、自适应巡航和紧急制动,以及少数车型的换挡杆和主动超车都是典型的动态驾驶任务。
但是,即使是同名的功能,由于技术指标不同,性能也不一样。以弯道车道保持为例。有些车辆只能应付一些不太急的弯道。比如遇到半径小于250m的弯道,很可能需要司机来控制。在Nullmax方案中,车辆可以支持曲率小得多的曲线,并支持自动合并。再比如变速杆变道。有些车型要求驾驶员确认路况,有些则要求变速杆在变道时达到一定速度以上。但对于不支持变速杆变道的车辆,驾驶员需要转动方向盘才能变道。在Nullmax的方案中,车辆可以在驾驶员拨杆后判断路况,决定变道时间。除了市场上可见的这些功能,自动驾驶还可以完成很多其他的DDT,比如侧向避让。一般来说,汽车的车道保持通常设定在车道的中心线上。但考虑到相邻车道可能存在不规则行驶,让车辆在安全距离内暂时偏离车道中心线,避开侧压车辆,可以有效降低危险,提高用户体验。这是Nullmax方案中的一个特征函数。动态驾驶任务支持DDT Fallback全称动态驾驶任务回退,意思是动态驾驶任务支持。这意味着在设计自动驾驶系统时,应考虑系统故障或超出系统运行设计范围的情况,并给出最小化风险的路径。在目前的量产方案中,分级预警是常见的DDT回退操作。虽然各家的最小风险状态设计不一样,但减速停车是一个通用的设计。除此之外,还有爬行状态、紧急呼叫等其他处理机制。
以Nullmax的方案为例,当系统检测到司机需要接管时,会分层次给出接管提示。如果司机在限定时间内没有回复一级提示,将会发出二级提示,提示的强度将会全面升级。如果车辆逾期未接管,车辆将进入最小风险状态,减速停车。此外,Nullmax的方案还可以配备一个运营中心,以支持驾驶过程中遇到的各种情况,包括处理来自车辆的紧急呼叫。硬件和成本受到车辆法规和成本问题的限制。在……之前nt,激光雷达只在少数量产车型中使用,而主流的自动驾驶量产方案仍然使用成熟的摄像头、毫米波雷达、超声波雷达等硬件。计算平台的选择也是如此。除了性能,还需要满足车辆分级标准,控制成本。
目前常见的自驾产品,功能和侧重点都不一样,所以有的车型会比较稳健保守,有的车型会比较激进。总的来说,功能越丰富、越智能,对硬件配置要求越高,成本也越高。正是考虑到这些因素,Nullmax的预装方案才能根据需求提供不同的硬件配置。车辆可选择高端配置实现所有功能,硬件成本控制在1万元以内;还可以选择基于低成本芯片的经济型配置,实现按需定制功能,大幅降低硬件成本。此外,在充分挖掘软硬件潜力的情况下,车辆也可以用更好的成本达到同样的体验。比如在Nullmax的一些定制方案中,通过角度雷达和传感器的融合,可以实现侧面后方和前方的障碍物感知,而不需要使用全景摄像头。目前市场上各种L2+及以上级别的自驾套装价格大多在数万元区间,实际体验不一。虽然有很多相似之处,但也有很多不同之处。自动驾驶汽车非常复杂,仅仅用L0-L5的等级来区分和判断是不够全面的。如果结合产品的适用范围、核心功能、动态驾驶任务支持、硬件配置、成本等因素,可以相对客观地判断一个方案的“好坏”。
标签:
12月6日消息,据外媒electrek报道,捷豹路虎公司日前表示将通过软件升级为首款纯电车型IPace增加8的续航里程。
1900/1/1 0:00:00提起新造车势力,不得不说的就是理想汽车。众所周知,理想汽车的CEO为李想,李想在汽车行业有着丰富的经验。在12月2日,李想通过微博发布了几辆理想ONE车型正在从常州的制造工厂开始装车运输准备交付。
1900/1/1 0:00:00(图片来源:Waymo官网)据外媒报道,12月5日的一项调查显示,对于汽车制造商、网约车公司和科技企业在电动、自动驾驶和车辆共享服务的投入,中国消费者的乐观程度要高于欧洲和美国消费者。
1900/1/1 0:00:00我们从蔚来汽车官方获悉,12月5日,第10000台蔚来ES6正式下线。
1900/1/1 0:00:00在大规模生产电动汽车之前,通用汽车首先确保电池供应的长期稳定。这是通用汽车向电动化过度的关键一步,而其它企业却常常忽视了这一点。
1900/1/1 0:00:00舍弗勒集团和AbteLine公司已就35吨以下轻型商用车的电动化战略合作达成协议。AbteLine是大众轻型电动商用车LCVs的优质合作伙伴。
1900/1/1 0:00:00