据国外媒体报道,美国专利商标局授予苹果一项泰坦项目专利,即用于推理、决策和运动规划的机器学习系统和算法,以控制自动驾驶或部分自动驾驶汽车。
苹果泰坦项目概念图(图片来源:patentlyapple.com)
机动车辆可以感知环境,在没有或只有少量连续输入的情况下进行导航,因此被称为自动驾驶或无人驾驶车辆,这是当前研发的重点。最近,由于可用硬件和软件的限制,在没有人工指导的情况下,执行用于分析车辆外部环境的相关计算的最大速度不足以做出重要的导航决策。然而,即使拥有快速的处理器、大内存和先进的算法,自动驾驶车辆在行为不可预测的背景下,客观上也很难做出及时合理的决策。而且与车辆环境相关的静态和动态部件数据不够完整,存在大量的干扰信息。
通过采用基于神经网络的强化学习模型,各种方法和装置实例可以对不同大小的自主车的行动空间进行评估。根据一些示例,一种方法可以包括在行驶各个时间点确定自动或部分自动车辆的当前状态的表示。
关于当前状态,该方法可以进一步包括可行的识别操作。例如,在一个示例中,使用车辆传感器捕获的数据可以在车辆行为规划器的决策组件处进行本地处理,并与地图信息相结合,以确定当前状态和可行的行动。
在美国的一些州中,当车辆在相对空的笔直高速公路上行驶几公里或几英里而没有转弯时,要评估的动作的数量可能相对较少。但是,在其他状态下,当车辆接近拥挤的十字路口时,动作的次数可能更多。
在各种示例中,每个动作可以包括多个不同的组成属性或特征,例如起点/源车道段(当评估动作时车辆所处的车道段)、目标车道段(如果执行动作,车辆将所处的车道段)、目标车道段中的目标速度、相对于一个或多个其他车辆或物体的定位等。
车辆的决策部件可能负责评估给定状态下不同的可行动作,选择一个动作实施,将所选动作的抽象表示转化为详细的运动规划,并向车辆的低级运动控制子系统(如加速子系统、转向子系统等)发出指令。)来实现所选动作对应的轨迹。
在一些实例中,多个实例或强化学习模型可以应用于车辆以获得相应的动作的价值度量,并且价值度量可以用于选择要实施的动作。在其他少数情况下,可以使用基于深度神经网络的机器学习模型(如通过图形或图像输入训练的卷积神经网络模型)来加强学习模型。
苹果专利的图1是系统环境的一个例子,其中可以使用强化学习模型来评估不同大小的行动空间,以帮助引导车辆运动。在各种示例中,乘客可以忽略车辆的决策组件来做出决定,或者甚至暂时禁用车辆的决策组件;此外,在至少一个示例中,车辆的决策部件可以请求或要求乘客在特定条件下做出决定。
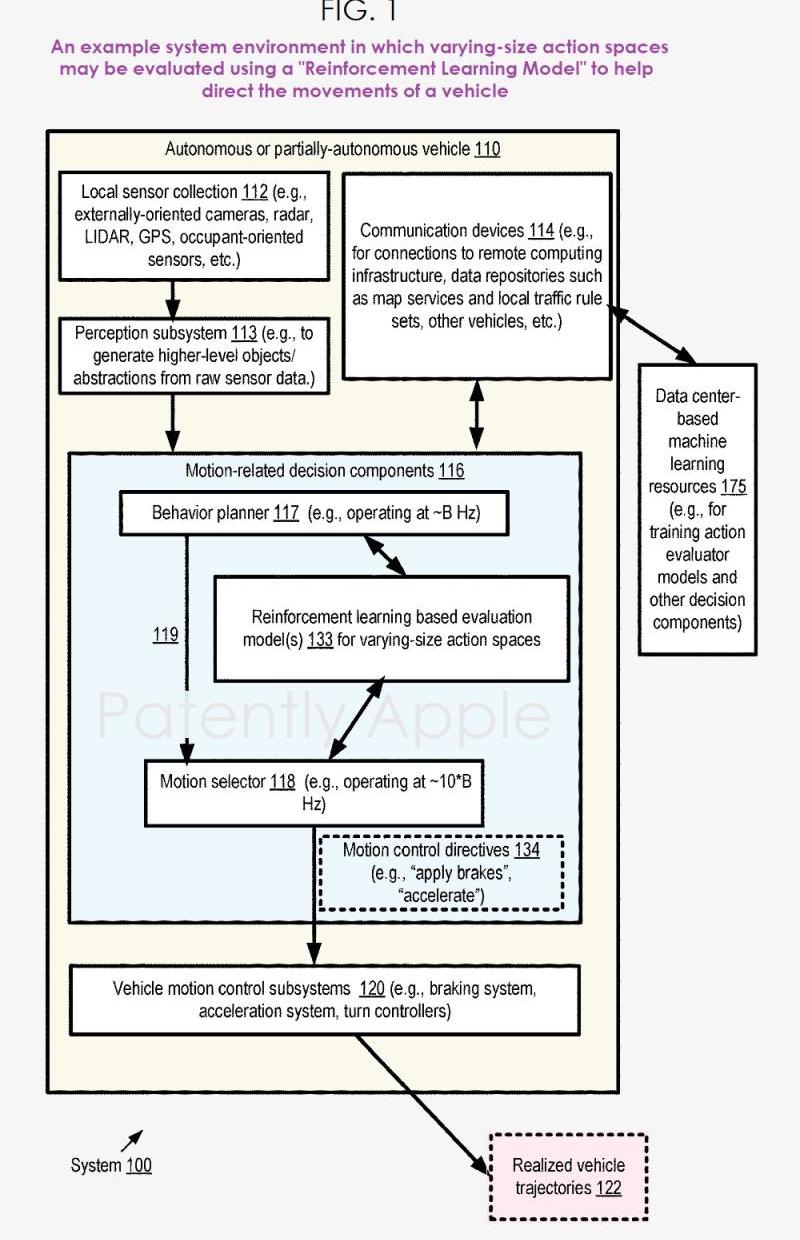
苹果专利图1(来源:patentlyapple.com)
苹果专利的图2是自动驾驶车辆决策场景的一个例子,展示了这类决策场景的相关问题特征。系统必须知道驾驶员当前的路线以及并道的方式和时间;何时离开匝道或变道;知道多种速度,保证并行道路的安全;检测路况;了解路标和路灯(停车,小心,往前走)等等。该系统需要实时处理大量信息。
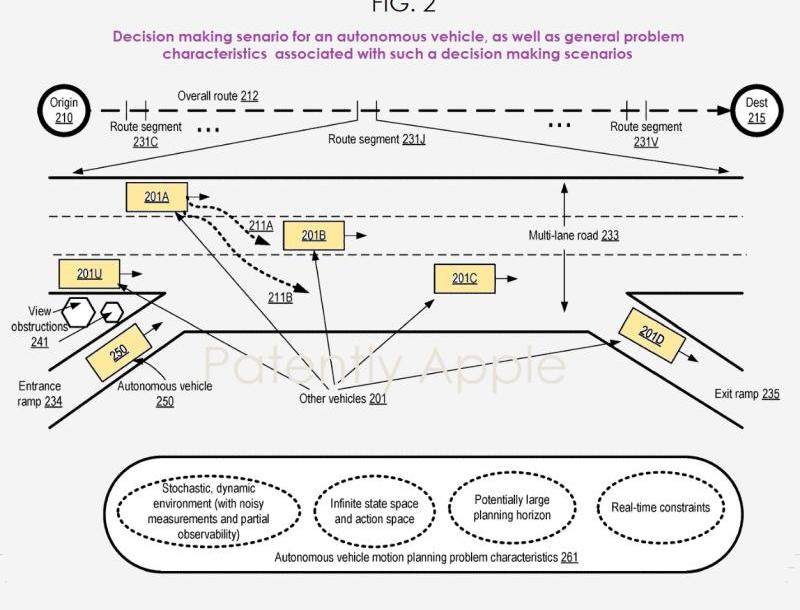
苹果专利图2(来源:patentlyapple.com)
图9是状态和动作属性或属性的示例,其中对应的因素仅可以在用于输入强化学习模型的编码中被识别。
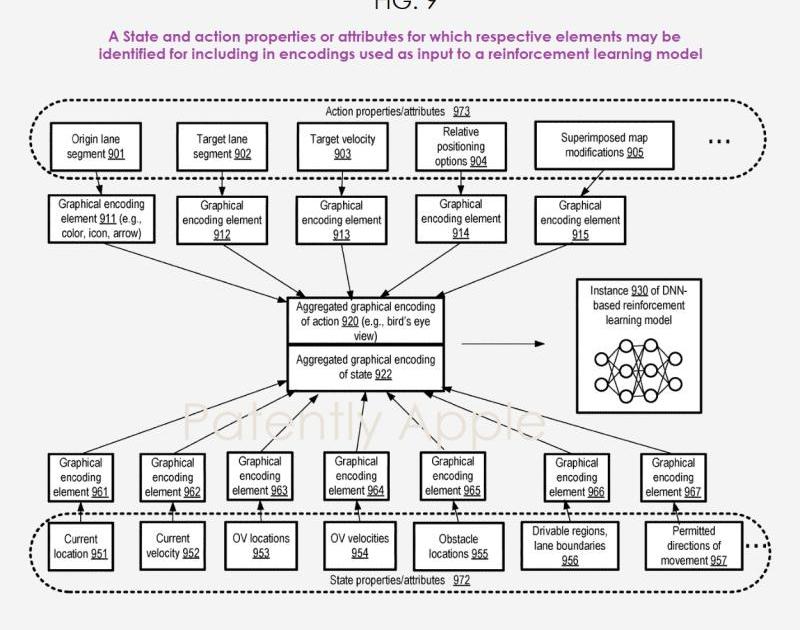
苹果专利图9(来源:patentlyapple.com)
对于给定的可行动作,要在编码中表示的属性或属性集(#973)可以包括例如源或当前车道路段(#901)、目标车道路段(#902)、目标速度或速度(#903)、相对于目标车道路段中的一个或多个其他车辆的相对定位选项(#904)以及上述示例轨迹。据国外媒体报道,美国专利商标局授予苹果一项泰坦项目专利,即用于推理、决策和运动规划的机器学习系统和算法,以控制自动驾驶或部分自动驾驶汽车。
苹果泰坦项目概念图(图片来源:patentlyapple.com)
机动车辆可以感知环境,在没有或只有少量连续输入的情况下进行导航,因此被称为自动驾驶或无人驾驶车辆,这是当前研发的重点。最近,由于可用硬件和软件的限制,在没有人工指导的情况下,执行用于分析车辆外部环境的相关计算的最大速度不足以做出重要的导航决策。然而,即使拥有快速的处理器、大内存和先进的算法,自动驾驶车辆在行为不可预测的背景下,客观上也很难做出及时合理的决策。而且与车辆环境相关的静态和动态部件数据不够完整,存在大量的干扰信息。
通过采用基于神经网络的强化学习模型,各种方法和装置实例可以对不同大小的自主车的行动空间进行评估。根据一些示例,一种方法可以包括在行驶各个时间点确定自动或部分自动车辆的当前状态的表示。
关于当前状态,该方法可以进一步包括可行的识别操作。例如,在一个示例中,使用车辆传感器捕获的数据可以在车辆行为规划器的决策组件处进行本地处理,并与地图信息相结合,以确定当前状态和可行的行动。
在美国的一些州中,当车辆在相对空的笔直高速公路上行驶几公里或几英里而没有转弯时,要评估的动作的数量可能相对较少。但是,在其他状态下,当车辆接近拥挤的十字路口时,动作的次数可能更多。
在各种示例中,每个动作可以包括多个不同的组成属性或特征,例如起点/源车道段(当评估动作时车辆所处的车道段)、目标车道段(如果执行动作,车辆将所处的车道段)、目标车道段中的目标速度、相对于一个或多个其他车辆或物体的定位等。
车辆的决策部件可能负责评估给定状态下不同的可行动作,选择一个动作实施,将所选动作的抽象表示转化为详细的运动规划,并向车辆的低级运动控制子系统(如加速子系统、转向子系统等)发出指令。)来实现所选动作对应的轨迹。
在一些实例中,多个实例或强化学习模型可以应用于车辆以获得相应的动作的价值度量,并且价值度量可以用于选择要实施的动作。在其他少数情况下,可以使用基于深度神经网络的机器学习模型(如通过图形或图像输入训练的卷积神经网络模型)来加强学习模型。
苹果专利的图1是系统环境的一个例子,其中可以使用强化学习模型来评估不同大小的行动空间,以帮助引导车辆运动。在各种示例中,乘客可能会忽略车辆的决策组件来做出决定,或者……ven暂时禁用车辆的决策组件;此外,在至少一个示例中,车辆的决策部件可以请求或要求乘客在特定条件下做出决定。
苹果专利图1(来源:patentlyapple.com)
苹果专利的图2是自动驾驶车辆决策场景的一个例子,展示了这类决策场景的相关问题特征。系统必须知道驾驶员当前的路线以及并道的方式和时间;何时离开匝道或变道;知道多种速度,保证并行道路的安全;检测路况;了解路标和路灯(停车,小心,往前走)等等。该系统需要实时处理大量信息。
苹果专利图2(来源:patentlyapple.com)
图9是状态和动作属性或属性的示例,其中对应的因素仅可以在用于输入强化学习模型的编码中被识别。
苹果专利图9(来源:patentlyapple.com)
对于给定的可行动作,要在编码中表示的属性或属性集(#973)可以包括例如源或当前车道路段(#901)、目标车道路段(#902)、目标速度或速度(#903)、相对于目标车道路段中的一个或多个其他车辆的相对定位选项(#904)以及上述示例轨迹。
标签:
2021年,特斯拉销量936万辆,以近百万辆的销量优势遥遥领先,连续4年摘得全球最畅销新能源车企的桂冠。比亚迪销量超594万辆,夺得亚军,上汽通用五菱销量456万辆,位居第三。
1900/1/1 0:00:00又来了比亚迪又要拿下特斯拉大笔电池订单了,几乎每隔几个月都会有这些类似的传言。
1900/1/1 0:00:00极氪001友交流群已建立,戳这里码上进群,更多一手消息及时关注。2月9日,极氪正式宣布ZEEKR001交付量突破1万辆,创造了高端智能纯电品牌首款车型交付量最快破万记录。
1900/1/1 0:00:002月7日,创维汽车与各事业部齐聚开沃集团参加开工仪式,并发布2022年计划。
1900/1/1 0:00:002021年对于电动汽车领域的投资者来无疑是美好的一年:以Rivian和Lucid为首的多家电动车“造车新贵”接连上市,紧随电动汽车行业龙头特斯拉的脚步,公司市值纷纷大幅膨胀。
1900/1/1 0:00:00盖世汽车讯据外媒报道,福特汽车公司申请电子离合器系统专利,该系统支持驾驶员手动换档,而不必担心离合器接合。
1900/1/1 0:00:00