Vector(向量)为汽车及相关行业的主机厂和供应商提供专业的开放开发平台。Vector提供的CANoe和CANape工具可以帮助ADAS数据系统应对不同传感器的同步传输、数据延迟预测、数据可视化等诸多挑战。
向量汽车技术(上海)有限公司商业发展经理周云鹏发表了主题为“向量辅助ADAS测试与测试”的演讲。以下是发言摘要:

周云鹏,威特汽车技术(上海)有限公司商务开发经理
此次分享的技术是Vector对L3自动驾驶记录系统的理解和认识,将从以下五个方面进行:
首先明确L3自动驾驶系统的定义。第二,L3自动驾驶仪需要记录。第三,Vector针对ADAS数据记录系统的解决方案。第四,数据录入后如何做数据物流。第五,如何使用记录的数据。
L3自动驾驶系统的定义
目前L3 ADAS域控制的硬件部分基本由微控制器和微处理器组成,对应的软件架构有经典AUTOSAR和自适应AUTOSAR。由于图像处理和传感器融合需要大量的计算,这对SoC提出了非常高的计算能力要求。在域控制运行过程中,会产生较大的功耗,一般采用水冷散热的方式。在开发和调试阶段,域控制器的外部接口可能包括XCP校准协议、SOME/IP、DDS等。根据不同的需求,发布的数据可能包括视频、激光雷达点云、调试信号等。通信模式可能包括CAN、LIN总线或以太网、万兆网络或PCle。以上是我从数据采集的角度对ADAS域控制器的理解和认识。
在传感器端,比如摄像头的图像数据可能是5-10通道,甚至10通道以上,L2级别的像素可能是200万或300万,L3级别的图像数据会提升到800万。其数据接口包括GMSL/FPD链路,ISP图像处理芯片通常置于域控制器中。有些相机可能会通过GPIO同步曝光。对于毫米波雷达,L3自动驾驶仪将配备前方雷达,角度雷达,甚至高级4D雷达。雷达提供点云、目标信息等数据,主要使用CAN或以太网接口。还有激光雷达,也是利用以太网提供原始点云信息;最后,超声波雷达,一般采用DSI3总线协议,部分协议采用LIN。
L3的ADAS系统也将配备真相系统,该系统可能通过结合激光雷达、摄像头和毫米波雷达来提供真相信息。它提供的数据测量接口通常是以太网接口,有自己的时域,数据同步通过PTP完成。以上是我从ADAS记录的角度对L3系统架构的理解。
L3自动驾驶仪数据记录系统对记录的要求
L3系统对数据记录有什么要求?首先是同步。同时,记录系统需要适应不同的车型和不同传感器的数量,记录各种接口的数据。二是足够的数据吞吐量,因为L3系统会适配很多传感器和ECU,并内置CAN总线、LIN总线、以太网等接口,对应不同的数据协议,总的数据带宽可能达到甚至超过1gbyte/s..三是满足交互的视觉要求。在车辆测试阶段,测试人员需要确认数据的准确性,以及是否可以通过可视窗口触发功能。最后是数据物流的安全性,数据上传到数据中心之前必须进行脱敏,可能会和云提供商或者地图厂商做一些合作。
下一步是每个传感器对数据记录的不同要求。
首先是摄像头传感器,需要记录原始图像。一种采集方法是需要在摄像机和域控制器之间连接记录系统来记录数据。另一种是域控制器接收摄像头传来的视频,然后通过LVDS接口输出。录制系统需要直接连接到域控制器的LVDS接口来录制视频。同时,由于记录数据量大,有时必须考虑数据的无损压缩。对于视频带宽,可以通过摄像头分辨率、图像输出格式、帧率来计算,从而评估录制系统应该满足多大的带宽吞吐量。
基本上,一个800万像素的摄像头一秒钟需要300多m字节的数据,自动驾驶汽车可能会安装5个以上甚至更多的摄像头,总的数据带宽会非常大。
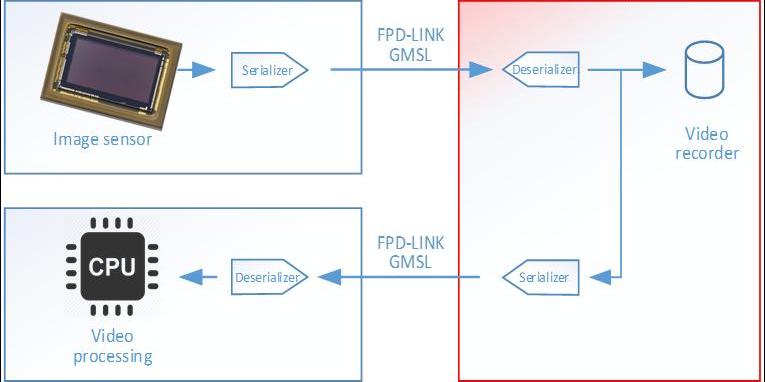
图片来源:矢量
另一方面,摄像头的数据经过域控制器处理后,采用一些/IP或DDS等协议,通过以太网和PCIe输出数据。Vector会针对这类数据做一个记录模块,会考虑客户的需求,对数据进行同步和可视化。
对于毫米波雷达来说,原始数据更有助于调试拐角情况,包括来自天线的ADC数据、傅里叶变换后的FFT数据、XCP数据等等。这里需要注意的一点是,如果雷达安装位置发生变化,OEM和Tier1要慎重考虑是否要重新做整体测试,比如重新采集一些场景信息。针对国际芯片厂商的雷达芯片,如英飞凌、恩智浦、TI等。,利用Vector VX1000的硬件支持,采集雷达的原始ADC数据和XCP数据。对于国内芯片制造商,如加特兰德,Vector的VX1000也支持雷达原始数据的采集。
激光雷达是相对简单的记录系统。因为激光雷达参与域控的数据融合,所以只需要通过以太网连接激光雷达和域控回路,就可以完成数据记录。并且确保当硬件不通电时,激光雷达和ECU也物理连接。
ADAS数据记录系统的矢量解决方案
首先,Vector的记录系统是硬件可扩展的,可以通过接口卡通道数的增减来适应传感器和控制器数量的增减。如果数据带宽大,记录仪可以级联,Vector的记录平台支持PTP时间同步,可以保证记录仪PTP主机和各个接口卡PTP从机PTP时间同步。
然后是软件部分,Vector通过CANape记录数据。可以为每个传感器制作单独的记录模块-DHPR记录器。视频和激光雷达都是DHPR recoder记录的,这些记录模块都是CANape调用的,记录的数据可以传回CANape显示。有些用户可能使用DDS传输数据,Vector可以为DDS开发相应的DHPR记录仪模块。
< img alt = " DS " src = "/ee img/{ HostI }/img/……230303181945337452/3.jpg "/>
图片来源:矢量
Vector观察到的一个需求是,一些用户希望在线获取数据。比如停车场景,用户需要测试停车功能,在线获取停车数据。Vector提供SL-API DLL,用户的应用集成这个API,在线获取记录仪中的预定义数据。用户也可以通过应用程序控制录像机的启动和停止。
以上是测量和记录的介绍,接下来是可视化的功能。我们用的软件是CANape,提供两种可视化窗口:第一种是场景视图,可以变换BEV、驾驶员视图等不同视角。另一个是视频窗口。软件采集的数据,如信号、结构、目标等信息,可以通过CANape在场景和视频窗口中显示,对测试人员非常友好。在L3系统运行稳定的情况下,CANape log可以支持离线模式记录,可以在没有机载测试人员的情况下,在记录仪上电时自动开始记录。
数据物流
目前我们看到数据物流主要有两种方式。一种方法是提取录音盘,送到公司,然后拷贝到数据中心。另一种方式是用户准备额外的物流硬盘,将硬盘提取出来插入数据复制设备,通过复印机将数据复制到物流硬盘中。复制完成后,硬盘会送到公司,上传到云端或数据中心。当然,数据物流也可以直接使用云提供商的服务,更加方便。
目前国家对车载数据安全的要求越来越高,法律法规要求录制的视频需要去除个人隐私信息,尤其是人脸和车牌。Vector针对这方面开发了AI和机器学习算法,可以去除隐私信息,比如模糊车牌和人脸,或者直接生成随机的车牌信息。
使用记录的数据
最后,Vector思考如何使用数据。矢量视频回放方案:1 .硬件:VP75作为硬件处理平台,运行数据回注软件;VX1161作为显卡,缓存VP75发来的视频,反馈给ECU。2.同步:VP75作为PTP的主控,同步所有视频板和CAN或ETH板。3.软件:CANoe负责HIL测试,stream provider负责视频回注,CANoe通过CAPL脚本调用Stream provider实现视频回注,其他总线回注也通过CANoe CAPL脚本实现。
(以上内容来自于2022年9月15日由Gaspar主办的2022年第五届自动驾驶与人机共驾论坛上,矢量汽车技术(上海)有限公司商业发展经理周云鹏发表的《矢量辅助ADAS实验与测试》主题演讲。)Vector(向量)为汽车及相关行业的主机厂和供应商提供专业的开放开发平台。Vector提供的CANoe和CANape工具可以帮助ADAS数据系统应对不同传感器的同步传输、数据延迟预测、数据可视化等诸多挑战。
向量汽车技术(上海)有限公司商业发展经理周云鹏发表了主题为“向量辅助ADAS测试与测试”的演讲。以下是发言摘要:
周云鹏,威特汽车技术(上海)有限公司商务开发经理
此次分享的技术是Vector对L3自动驾驶记录系统的理解和认识,将从以下五个方面进行:
首先明确L3自动驾驶系统的定义。第二,L3自动驾驶仪需要记录。第三,Vector针对ADAS数据记录系统的解决方案。第四,数据录入后如何做数据物流。第五,如何使用记录的数据。
L3自动驾驶系统的定义
目前L3 ADAS域控制的硬件部分基本由微控制器和微处理器组成,对应的软件架构有经典AUTOSAR和自适应AUTOSAR。由于图像处理和传感器融合需要大量的计算,这对SoC提出了非常高的计算能力要求。在域控制运行过程中,会产生较大的功耗,一般采用水冷散热的方式。在开发和调试阶段,域控制器的外部接口可能包括XCP校准协议、SOME/IP、DDS等。根据不同的需求,发布的数据可能包括视频、激光雷达点云、调试信号等。通信模式可能包括CAN、LIN总线或以太网、万兆网络或PCle。以上是我从数据采集的角度对ADAS域控制器的理解和认识。
在传感器端,比如摄像头的图像数据可能是5-10通道,甚至10通道以上,L2级别的像素可能是200万或300万,L3级别的图像数据会提升到800万。其数据接口包括GMSL/FPD链路,ISP图像处理芯片通常置于域控制器中。有些相机可能会通过GPIO同步曝光。对于毫米波雷达,L3自动驾驶仪将配备前方雷达,角度雷达,甚至高级4D雷达。雷达提供点云、目标信息等数据,主要使用CAN或以太网接口。还有激光雷达,也是利用以太网提供原始点云信息;最后,超声波雷达,一般采用DSI3总线协议,部分协议采用LIN。
L3的ADAS系统也将配备真相系统,该系统可能通过结合激光雷达、摄像头和毫米波雷达来提供真相信息。它提供的数据测量接口通常是以太网接口,有自己的时域,数据同步通过PTP完成。以上是我从ADAS记录的角度对L3系统架构的理解。
L3自动驾驶仪数据记录系统对记录的要求
L3系统对数据记录有什么要求?首先是同步。同时,记录系统需要适应不同的车型和不同传感器的数量,记录各种接口的数据。二是足够的数据吞吐量,因为L3系统会适配很多传感器和ECU,并内置CAN总线、LIN总线、以太网等接口,对应不同的数据协议,总的数据带宽可能达到甚至超过1gbyte/s..三是满足交互的视觉要求。在车辆测试阶段,测试人员需要确认数据的准确性,以及是否可以通过可视窗口触发功能。最后是数据物流的安全性,数据上传到数据中心之前必须进行脱敏,可能会和云提供商或者地图厂商做一些合作。
下一步是每个传感器对数据记录的不同要求。
首先是摄像头传感器,需要记录原始图像。一种采集方法是需要在摄像机和域控制器之间连接记录系统来记录数据。另一种是域控制器接收摄像头传来的视频,然后通过LVDS接口输出。录制系统需要直接连接到域控制器的LVDS接口来录制视频。同时,由于记录数据量大,有时必须考虑数据的无损压缩。对于视频带宽,可以通过摄像头分辨率、图像输出格式、帧率来计算,从而评估录制系统应该满足多大的带宽吞吐量。
基本上,一个800万像素的摄像头一秒钟需要300多m字节的数据,自动驾驶汽车可能会安装5个以上甚至更多的摄像头,总的数据带宽会非常大。
图片来源:矢量
另一方面,摄像头的数据经过域控制器处理后,采用一些/IP或DDS等协议,通过以太网和PCIe输出数据。Vector会针对这类数据做一个记录模块,会考虑客户的需求,对数据进行同步和可视化。
对于毫米波雷达来说,原始数据更有助于调试拐角情况,包括来自天线的ADC数据、傅里叶变换后的FFT数据、XCP数据等等。这里需要注意的一点是,如果雷达安装位置发生变化,OEM和Tier1要慎重考虑是否要重新做整体测试,比如重新采集一些场景信息。针对国际芯片厂商的雷达芯片,如英飞凌、恩智浦、TI等。,利用Vector VX1000的硬件支持,采集雷达的原始ADC数据和XCP数据。对于国内芯片制造商,如加特兰德,Vector的VX1000也支持雷达原始数据的采集。
激光雷达是相对简单的记录系统。因为激光雷达参与域控的数据融合,所以只需要通过以太网连接激光雷达和域控回路,就可以完成数据记录。并且确保当硬件不通电时,激光雷达和ECU也物理连接。
ADAS数据记录系统的矢量解决方案
首先,Vector的记录系统是硬件可扩展的,可以通过接口卡通道数的增减来适应传感器和控制器数量的增减。如果数据带宽大,记录仪可以级联,Vector的记录平台支持PTP时间同步,可以保证记录仪PTP主机和各个接口卡PTP从机PTP时间同步。
然后是软件部分,Vector通过CANape记录数据。可以为每个传感器制作单独的记录模块-DHPR记录器。视频和激光雷达都是DHPR recoder记录的,这些记录模块都是CANape调用的,记录的数据可以传回CANape显示。有些用户可能使用DDS传输数据,Vector可以为DDS开发相应的DHPR记录仪模块。
< img alt = " DS " src = "/ee img/{ HostI }/img/……230303181945337452/3.jpg "/>
图片来源:矢量
Vector观察到的一个需求是,一些用户希望在线获取数据。比如停车场景,用户需要测试停车功能,在线获取停车数据。Vector提供SL-API DLL,用户的应用集成这个API,在线获取记录仪中的预定义数据。用户也可以通过应用程序控制录像机的启动和停止。
以上是测量和记录的介绍,接下来是可视化的功能。我们用的软件是CANape,提供两种可视化窗口:第一种是场景视图,可以变换BEV、驾驶员视图等不同视角。另一个是视频窗口。软件采集的数据,如信号、结构、目标等信息,可以通过CANape在场景和视频窗口中显示,对测试人员非常友好。在L3系统运行稳定的情况下,CANape log可以支持离线模式记录,可以在没有机载测试人员的情况下,在记录仪上电时自动开始记录。
数据物流
目前我们看到数据物流主要有两种方式。一种方法是提取录音盘,送到公司,然后拷贝到数据中心。另一种方式是用户准备额外的物流硬盘,将硬盘提取出来插入数据复制设备,通过复印机将数据复制到物流硬盘中。复制完成后,硬盘会送到公司,上传到云端或数据中心。当然,数据物流也可以直接使用云提供商的服务,更加方便。
目前国家对车载数据安全的要求越来越高,法律法规要求录制的视频需要去除个人隐私信息,尤其是人脸和车牌。Vector针对这方面开发了AI和机器学习算法,可以去除隐私信息,比如模糊车牌和人脸,或者直接生成随机的车牌信息。
使用记录的数据
最后,Vector思考如何使用数据。矢量视频回放方案:1 .硬件:VP75作为硬件处理平台,运行数据回注软件;VX1161作为显卡,缓存VP75发来的视频,反馈给ECU。2.同步:VP75作为PTP的主控,同步所有视频板和CAN或ETH板。3.软件:CANoe负责HIL测试,stream provider负责视频回注,CANoe通过CAPL脚本调用Stream provider实现视频回注,其他总线回注也通过CANoe CAPL脚本实现。
(以上内容来自于2022年9月15日由Gaspar主办的2022年第五届自动驾驶与人机共驾论坛上,矢量汽车技术(上海)有限公司商业发展经理周云鹏发表的《矢量辅助ADAS实验与测试》主题演讲。)
标签:DS
盖世汽车讯9月27日,互联、电动和自动驾驶汽车(AV)数据的云和软件分析公司WejoGroupLimited(Wejo)宣布推出AV原型DLIVEREE,
1900/1/1 0:00:00经历过2018、19年的生死边缘,成功登陆资本市场的造车新势力过上了几年的好日子。但是,在越来越多传统以及其他势力推出新车的当下,原先头部新势力的日子又面临了新的变数。
1900/1/1 0:00:00浙江零跑科技股份有限公司(以下简称“零跑科技”)于2022年9月29日正式以“9863HK”为股票代码在港交所主板挂牌上市。
1900/1/1 0:00:00盖世汽车讯据外媒报道,大众汽车集团将保时捷最终的上市发行价定为每股825欧元,估值达到750亿欧元。
1900/1/1 0:00:001、售价19382868万元零跑C01正式上市9月28日,零跑C01正式上市,新车共推出5款车型,补贴后售价区间为19382868万元。
1900/1/1 0:00:009月29日,零跑汽车正式在港交所上市,成为继蔚小理之后,第四家上市的造车新势力。
1900/1/1 0:00:00