特斯拉最近出了大新闻。只有内部邮件宣称已经实现了L2自动驾驶,这一次完全是“纯视觉”。

这一次,美国时间7月10日,特斯拉FSD Beta V9.0终于推送给了美国的用户。与之前的版本相比,V9.0进行了FSD历史上最大的更新。完全放弃了雷达的使用。而且特斯拉招募了2000名车主进行内测,报名踊跃。但是,BUG很快就出来了。这不,一个叫Giacaglia的网友看了特斯拉车主发来的视频,立马收集了FSD 9.0 beta中的11个错误。从动图来看,很明显现在的系统只能算是辅助驾驶。如果摆脱了,或者离开了人的监督,还是会出事的。这次能看到的bug如下:场景一:自动转弯后,撞到路中间的绿化带。场景2:无法识别道路中的单轨道路。场景三:闯入公交专用道。场景四:单行道逆行。场景五:不停变道。当你在十字路口右转时,你无法判断该走哪条车道。场景六:汽车压实线平行;当你需要紧急变道时,因为后面的车辆正在靠近,你错过了机会,只能在下一个路口相遇。场景七:超车后道路有标志,要强行并线。场景八:左转时提前变道。场景九:左转时,差点进了对面的路边停车位。场景10:汽车要经过几条车道才能左转。场景11:在一个只有停车标志的地方,你看到两个停车标志。

“作为深度学习方向的人,我肯定不敢坐有神经网络的车……”“对,我在做ML(机器学习)看现在的自动驾驶,堪比医生遇到失败的同学给自己做手术。”“强迫机器学习人(纯粹靠视觉)是错误的发展方向。机器有自己的优势(可以自由安装雷达等设备进行辅助)而不用,这是典型的教条主义和本本主义。”.....这是一个很专业的问题。那么,特斯拉对科技树的看法是错误的吗?虽然这个问题见仁见智,但是从主流的CV(计算机视觉)+雷达路线来看,特斯拉有点像“Xi杜”欧阳锋。为了降低成本,纯视觉已经走到黑了。虽然“死也不后悔”的精神是存在的,但这是消费者的生命...为什么是纯视觉?如果说特斯拉老老实实说自己是司机助手的话,糟糕的是马斯克从一开始就喜欢“吹”autopilot,吹了之后还在内部邮件里承认是L2司机助手。然而现在马斯克已经被吹成了神话,这场造神运动已经让马斯克无法骑在虎背上。而且国内外“特殊打击”太多,包括大众集团CEO赫伯特迪斯博士。当然,迪斯博士打特斯拉麻痹敌人,另当别论。

且不说特斯拉多年排名垫底的自动驾驶技术害死了多少人。要说特斯拉依靠“纯视觉”方案就能达到全自动驾驶的L4~L5水平,真是不可思议。苏黎世联邦理工学院教授Marc Pollefeys认为,特斯拉不太可能放弃全自动驾驶近在咫尺的想法。“许多人已经为它(特斯拉的FSD包)付出了代价,所以他们必须保持希望,”他说。“他们被困在那个故事里了。”这个故事已经成为一个神话。那么,特斯拉为什么取消雷达使用纯视觉呢?特斯拉一再强调,很难融合摄像头数据和雷达数据。当相机数据和雷达数据发生冲突时,系统会更难选择。所以马斯克也说过,与其让两者互相拉回来,不如只选一个,并且做到极致。而且在他看来,特斯拉的深度学习系统比毫米波雷达强100倍,现在毫米波雷达已经开始拖后腿了。在今年的CVPR(Computational Vision and Pattern Recognition Conference)上,特斯拉首席AI科学家Andrej Capassi也谈到了特斯拉如此顽固的原因。但是,对于误入歧途的特斯拉,我们还是奉劝保持冷静。

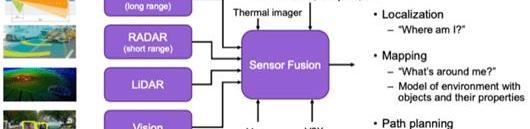
为什么?其实道理很简单。虽然人在开车,主要是视觉,但是其他感官是综合的,不是无用的。比如听觉,身体触觉,甚至有意识的直觉。“事实上,在驾驶时,人类几乎是无意识的,因此可以预测下一步该做什么,从而避免事故的发生。”这是奇瑞科技有限公司总经理李在世界人工智能大会的一个论坛上说的话。在这一点上,特斯拉有点太执着于视觉了。通用视觉系统和神经网络那么,在本次CVPR上,特斯拉的Andrej Capassi详细介绍的基于深度学习的自动驾驶系统,也就是全视觉,有哪些好处呢?特斯拉的底气是采用“通用视觉系统”和“神经网络”两大黑科技。当然,卡帕西强调,从技术角度来看,基于视觉的自动驾驶更难实现,因为它需要神经网络仅基于视频输入来实现超性能输出。“然而,一旦取得突破,就可以获得通用的视觉系统,这很容易……部署在地球上的任何地方。”“我们抛弃了毫米波雷达,车辆只靠视觉行驶。“卡帕西认为,有了通用视觉系统,车辆不再需要任何补充信息。特斯拉始终认为,收集环境信息是一回事,使用环境信息又是另一回事。而且传感器的种类和数量越多,相互之间的协调和整合就越困难,最终的效果很可能只有1+1 < 2,得不偿失。特斯拉这次发布的FSD Beta V9.0,从技术上来说,新算法调用所有8个用于自动驾驶的摄像头,修复跨镜头畸变和时差,拼接成全景视觉,然后对周围环境进行实时3D建模。那就是特斯拉所说的“鸟瞰视觉”。

具体来说,特斯拉将2D视图转换为模拟的激光雷达数据,然后用(激光雷达)算法处理这些数据,获得比以前好得多的视觉测距精度。你不觉得奇怪吗,既然还要用激光雷达算法,为什么不用激光雷达?据特斯拉称,其自动驾驶系统基于神经网络特征识别、预测和调节。对于学习道路环境项目,比如交通标志是什么意思,需要通过很多场景素材来训练系统。训练越多,系统能处理的场景就越多。通过百万车主积累的大数据,特斯拉可以轻松在当前的城市道路上自主驾驶。事实上,马斯克一直想把特斯拉的制造成本降到最低。成本方面,目前特斯拉Model 3的自动驾驶摄像头成本仅为65美元。激光雷达的成本基本都在1000美元以上。要知道,2018年,威力登64线激光雷达HDL-64的价格高达7.5万美元。当然,支撑特斯拉车价一再下跌的是成本控制。但是,马斯克和特斯拉还是太迷信软件和AI的力量了。对于自动驾驶的“长尾问题”,特斯拉认为靠AI和超级计算机解决是有问题的。即使完成了99%,最后的1%依然是不可逾越的鸿沟。

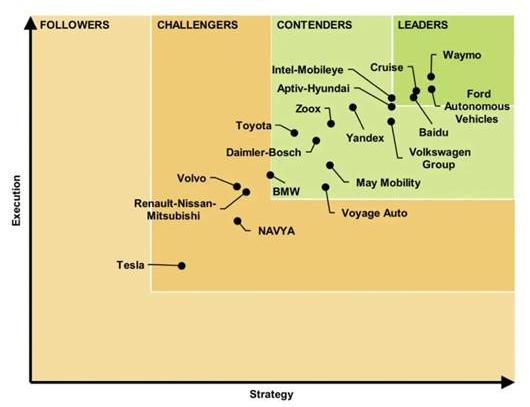
此外,一些外媒认为,美国传统汽车公司通用汽车将在2021年超过特斯拉,因为特斯拉在自动驾驶方面已经落后,尤其是在“纯视觉”路线上。传感器融合是未来纯视觉的极限。有业内人士认为,在一些极端场景下,无法满足感知检测能力的KPI指标。比如一些复杂的天气情况,比如暴雨、大雾、沙尘、强光、夜晚,对于视觉和激光雷达来说都是非常恶劣的场景,很难用一个传感器来应对。主要体现在几大方面:1)天气和环境因素(如逆光眩光、沙尘暴遮挡等)导致视觉传感器的致盲。);2)低分辨率视觉感知系统中的小目标物体可能会造成目标识别延迟(如减速带、小动物、锥体等。);3)外来目标可能因未经训练而匹配不上,被遗漏识别(路面落石、前车掉胎等。);4)视觉传感器本身的识别要求和视觉识别的高计算能力要求。甚至一些自动驾驶测试或者成熟厂商在智能驾驶上也有不少撞车事件,为传感器系统的失灵付出惨痛的代价。因此,传感器融合是构建稳定传感系统的必要条件。毕竟视觉感知能力有限,必须和毫米波雷达或者激光雷达结合起来互补。
回过头来看,如果特斯拉内部BUG中有一个场景没有被人类司机接管,就会演变成交通事故。这让人放心吗?特斯拉的车主也很担心。此外,我们知道摄像头如何感知深度只是自动驾驶问题的一部分。特斯拉所依赖的最先进的机器学习只识别模式,这意味着它将在新的情况下挣扎。纠结的时候会有误判。与人类司机不同,如果系统没有遇到场景,它无法推理该做什么。“没有人工智能系统知道实际发生了什么,”康奈尔大学研究自动驾驶汽车计算机视觉的副教授基利安·温伯格说。
还有一点,虽然FSD 9.0为智能驾驶辅助系统创造了更广阔的应用场景,但是在L2级别的驾驶辅助系统(不是自动驾驶系统)的前提下,这些功能还是有些尴尬,因为在驾驶过程中是不可能摆脱的。而且人类驾驶员不仅需要手握方向盘,还需要在城市道路上与车载电脑系统竞争,增加了额外的负担和心理压力。FSD BETA V9.0的这些内部bug会在实际道路上反复出现,无疑给城市交通制造了更多隐患。但是,这个系统能不能用在中国更复杂的开放道路上?公社里还有一些小伙伴对特斯拉超级有信心。“大家都没打开过。你怎么知道会不会有用?”是的,不管是骡子还是马,特斯拉总是会拉着它出去散步。特斯拉最近出了大新闻。只有内部邮件宣称已经实现了L2自动驾驶,这一次完全是“纯视觉”。
这一次,美国时间7月10日,特斯拉FSD Beta V9.0终于推送给了美国的用户。与之前的版本相比,V9.0进行了FSD历史上最大的更新。完全放弃了雷达的使用。而且特斯拉招募了2000名车主进行内测,报名踊跃。但是,BUG很快就出来了。这不,一个叫Giacaglia的网友看了特斯拉车主发来的视频,立马收集了FSD 9.0 beta中的11个错误。从动图来看,很明显现在的系统只能算是辅助驾驶。如果摆脱了,或者离开了人的监督,还是会出事的。这次能看到的bug如下:场景一:自动转弯后,撞到路中间的绿化带。场景2:无法识别道路中的单轨道路。场景三:闯入公交专用道。场景四:单行道逆行。场景五:不停变道。当你在十字路口右转时,你无法判断该走哪条车道。场景六:汽车压实线平行;当你需要紧急变道时,因为后面的车辆正在靠近,你错过了机会,只能在下一个路口相遇。场景七:超车后道路有标志,要强行并线。场景八:左转时提前变道。场景九:左转时,差点进了对面的路边停车位。场景10:汽车要经过几条车道才能左转。场景11:在一个只有停车标志的地方,你看到两个停车标志。
“作为深度学习方向的人,我肯定不敢坐有神经网络的车……”“对,我在做ML(机器学习)看现在的自动驾驶,堪比医生遇到失败的同学给自己做手术。”“强迫机器学习人(纯粹靠视觉)是错误的发展方向。机器有自己的优势(可以自由安装雷达等设备进行辅助)而不用,这是典型的教条主义和本本主义。”.....这是一个很专业的问题。那么,特斯拉对科技树的看法是错误的吗?虽然这个问题见仁见智,但是从主流的CV(计算机视觉)+雷达路线来看,特斯拉有点像“Xi杜”欧阳锋。为了降低成本,纯视觉已经走到黑了。虽然“死也不后悔”的精神是存在的,但这是消费者的生命...为什么是纯视觉?如果说特斯拉老老实实说自己是司机助手的话,糟糕的是马斯克从一开始就喜欢“吹”autopilot,吹了之后还在内部邮件里承认是L2司机助手。然而现在马斯克已经被吹成了神话,这场造神运动已经让马斯克无法骑在虎背上。而且国内外“特殊打击”太多,包括大众集团CEO赫伯特迪斯博士。当然,迪斯博士打特斯拉麻痹敌人,另当别论。
且不说特斯拉多年排名垫底的自动驾驶技术害死了多少人。要说特斯拉依靠“纯视觉”方案就能达到全自动驾驶的L4~L5水平,真是不可思议。苏黎世联邦理工学院教授Marc Pollefeys认为,特斯拉不太可能放弃全自动驾驶近在咫尺的想法。“许多人已经为它(特斯拉的FSD包)付出了代价,所以他们必须保持希望,”他说。“他们被困在那个故事里了。”这个故事已经成为一个神话。那么,特斯拉为什么取消雷达使用纯视觉呢?特斯拉一再强调,很难融合摄像头数据和雷达数据。当相机数据和雷达数据发生冲突时,系统会更难选择。所以马斯克也说过,与其让两者互相拉回来,不如只选一个,并且做到极致。而且在他看来,特斯拉的深度学习系统比毫米波雷达强100倍,现在毫米波雷达已经开始拖后腿了。在今年的CVPR(Computational Vision and Pattern Recognition Conference)上,特斯拉首席AI科学家Andrej Capassi也谈到了特斯拉如此顽固的原因。但是,对于误入歧途的特斯拉,我们还是奉劝保持冷静。
为什么?其实道理很简单。虽然人在开车,主要是视觉,但是其他感官是综合的,不是无用的。比如听觉,身体触觉,甚至有意识的直觉。“事实上,在驾驶时,人类几乎是无意识的,因此可以预测下一步该做什么,从而避免事故的发生。”这是奇瑞科技有限公司总经理李在世界人工智能大会的一个论坛上说的话。在这一点上,特斯拉有点太执着于视觉了。通用视觉系统和神经网络那么,在本次CVPR上,特斯拉的Andrej Capassi详细介绍的基于深度学习的自动驾驶系统,也就是全视觉,有哪些好处呢?特斯拉的底气是采用“通用视觉系统”和“神经网络”两大黑科技。当然,卡帕西强调,从技术角度来看,基于视觉的自动驾驶更难实现,因为它需要神经网络仅基于视频输入来实现超性能输出。“然而,一旦取得突破,就可以获得通用的视觉系统,这很容易……部署在地球上的任何地方。”“我们抛弃了毫米波雷达,车辆只靠视觉行驶。“卡帕西认为,有了通用视觉系统,车辆不再需要任何补充信息。特斯拉始终认为,收集环境信息是一回事,使用环境信息又是另一回事。而且传感器的种类和数量越多,相互之间的协调和整合就越困难,最终的效果很可能只有1+1 < 2,得不偿失。特斯拉这次发布的FSD Beta V9.0,从技术上来说,新算法调用所有8个用于自动驾驶的摄像头,修复跨镜头畸变和时差,拼接成全景视觉,然后对周围环境进行实时3D建模。那就是特斯拉所说的“鸟瞰视觉”。
具体来说,特斯拉将2D视图转换为模拟的激光雷达数据,然后用(激光雷达)算法处理这些数据,获得比以前好得多的视觉测距精度。你不觉得奇怪吗,既然还要用激光雷达算法,为什么不用激光雷达?据特斯拉称,其自动驾驶系统基于神经网络特征识别、预测和调节。对于学习道路环境项目,比如交通标志是什么意思,需要通过很多场景素材来训练系统。训练越多,系统能处理的场景就越多。通过百万车主积累的大数据,特斯拉可以轻松在当前的城市道路上自主驾驶。事实上,马斯克一直想把特斯拉的制造成本降到最低。成本方面,目前特斯拉Model 3的自动驾驶摄像头成本仅为65美元。激光雷达的成本基本都在1000美元以上。要知道,2018年,威力登64线激光雷达HDL-64的价格高达7.5万美元。当然,支撑特斯拉车价一再下跌的是成本控制。但是,马斯克和特斯拉还是太迷信软件和AI的力量了。对于自动驾驶的“长尾问题”,特斯拉认为靠AI和超级计算机解决是有问题的。即使完成了99%,最后的1%依然是不可逾越的鸿沟。
此外,一些外媒认为,美国传统汽车公司通用汽车将在2021年超过特斯拉,因为特斯拉在自动驾驶方面已经落后,尤其是在“纯视觉”路线上。传感器融合是未来纯视觉的极限。有业内人士认为,在一些极端场景下,无法满足感知检测能力的KPI指标。比如一些复杂的天气情况,比如暴雨、大雾、沙尘、强光、夜晚,对于视觉和激光雷达来说都是非常恶劣的场景,很难用一个传感器来应对。主要体现在几大方面:1)天气和环境因素(如逆光眩光、沙尘暴遮挡等)导致视觉传感器的致盲。);2)低分辨率视觉感知系统中的小目标物体可能会造成目标识别延迟(如减速带、小动物、锥体等。);3)外来目标可能因未经训练而匹配不上,被遗漏识别(路面落石、前车掉胎等。);4)视觉传感器本身的识别要求和视觉识别的高计算能力要求。甚至一些自动驾驶测试或者成熟厂商在智能驾驶上也有不少撞车事件,为传感器系统的失灵付出惨痛的代价。因此,传感器融合是构建稳定传感系统的必要条件。毕竟视觉感知能力有限,必须和毫米波雷达或者激光雷达结合起来互补。
回过头来看,如果特斯拉内部BUG中有一个场景没有被人类司机接管,就会演变成交通事故。这让人放心吗?特斯拉的车主也很担心。此外,我们知道摄像头如何感知深度只是自动驾驶问题的一部分。特斯拉所依赖的最先进的机器学习只识别模式,这意味着它将在新的情况下挣扎。纠结的时候会有误判。与人类司机不同,如果系统没有遇到场景,它无法推理该做什么。“没有人工智能系统知道实际发生了什么,”康奈尔大学研究自动驾驶汽车计算机视觉的副教授基利安·温伯格说。
还有一点,虽然FSD 9.0为智能驾驶辅助系统创造了更广阔的应用场景,但是在L2级别的驾驶辅助系统(不是自动驾驶系统)的前提下,这些功能还是有些尴尬,因为在驾驶过程中是不可能摆脱的。而且人类驾驶员不仅需要手握方向盘,还需要在城市道路上与车载电脑系统竞争,增加了额外的负担和心理压力。FSD BETA V9.0的这些内部bug会在实际道路上反复出现,无疑给城市交通制造了更多隐患。但是,这个系统能不能用在中国更复杂的开放道路上?公社里还有一些小伙伴对特斯拉超级有信心。“大家都没打开过。你怎么知道会不会有用?”是的,不管是骡子还是马,特斯拉总是会拉着它出去散步。
盖世汽车讯据外媒报道,大众汽车紧随特斯拉之后,也呼吁印度政府降低电动汽车的进口关税,以刺激印度市场清洁汽车的需求。
1900/1/1 0:00:00保时捷控股公司因柴油门丑闻在美国面临诉讼大众汽车最大股东保时捷控股公司正因柴油门丑闻在美国面临诉讼,保时捷控股在其半年报告中表示,
1900/1/1 0:00:00日前,我们从互联网获悉,金华零跑新能源汽车零部件技术有限公司成立,该公司由浙江零跑科技股份有限公司100控股。
1900/1/1 0:00:00一面是供应紧缺引发的涨价潮,一面是大规模的产能跃进,六氟磷酸锂产能“大跃进”需警惕隐忧。
1900/1/1 0:00:00近日,宁德时代获“钠离子电池”专利授权,公告号CN111525099B,申请日期为2019年2月。专利摘要显示,本申请公开了一种钠离子电池,其包括正极极片、负极极片、隔离膜及电解液。
1900/1/1 0:00:00