作者/阿宝编辑/阿宝出品/阿宝1990

首先,我们来看看自动驾驶的主要技术,它们分为三类:感知层、决策层和控制层。
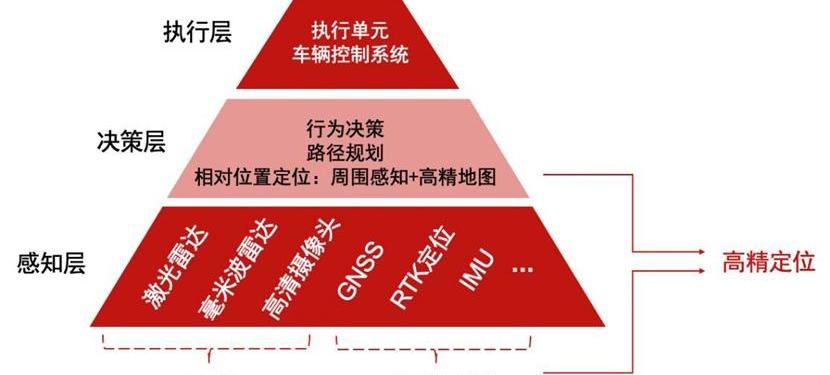
如上图所示,高精度技术位于感知层面和决策层面,为自动驾驶系统提供底层支撑。自动驾驶是一个庞大而复杂的技术系统,类似于人类的驾驶行为。人类的感知是通过眼睛和耳朵实现的;自动驾驶感知层:主要由激光雷达、摄像头、高精度地图、IMU/GPS等部分组成,主要负责收集周围车身的信息;一个人的决策水平是通过比较记忆来做出决策,例如方向盘控制、加速/减速、变道、制动等;自动驾驶决策层:基于感知信息数据,通过高计算能力的计算中心获得优化的驾驶决策;执行层:根据决策层提供的驾驶决策,向制动系统、发动机转向和其他控制装置发出指令,负责驾驶执行;

高精度定位涉及感知层和决策层,为自动驾驶汽车提供车辆的空间坐标和当前场景中的相对位置坐标,以及位置相关信息,包括速度、加速度、车辆姿态、航向角等。向上延伸,高精度定位涉及车辆速度控制、路径规划、障碍物检测和规避以及车辆行为决策等决策和控制层。

当谈到地图的精度要求时,ADAS自动驾驶经常提到定位精度问题。许多制造商声称定位精度基本相同。许多人,甚至在进入汽车行业之前,就希望自动驾驶非常安全,整个车辆在行驶时非常安全。这个具体指标不是很清楚,但最好达到极限。就汽车发展而言,有必要平衡成本和安全性。例如,在制造汽车时,我们不能都使用装甲车的厚钢板。虽然被动安全非常令人印象深刻,但在价格、油耗和加速方面都做不好。如果消费者体验不好,他们就不会付钱。如果我们都做了这么多安全措施,那就没有意义了,就像以下产品一样:一架永远不会起飞或降落的飞机;永不离开车站的火车;一辆永远不会启动的汽车;
一台从未运行过的X光机,目前用于自动驾驶,涉及功能安全。在功能安全指标的基础上,应制定合理的安全措施以满足这些指标,然后才能运行。最近,一篇关于福特汽车的文章通过统计推导得出结论,参考文献为《自动驾驶汽车的国产化要求》。具体的物品连接可以看出:基于功能安全的车道级定位精度分析。对于L3级以上的自动驾驶,如果定位误差为0.39米,则相应的误差为0.39%。对于现代GNSS,只要提供PPP和RTK校正服务,并且置信水平高,绝大多数人都可以满足这一数字要求。同样,对于高精度地图,大多数公司也可以满足0.39米的误差。从简单的实际驾驶场景来看,驾驶车辆与道路一侧路缘石之间的安全距离通常为25厘米。假设自动驾驶汽车的最高速度为90公里/小时,25厘米的驾驶距离需要0.01秒,对应的频率为100赫兹,我们将使用最简单的实际行驶环境,如果我们想支持自动驾驶汽车的高精度技术,精度应≤25厘米,定位信息的更新频率应至少为100Hz,以有效确保自动驾驶车辆的驾驶安全。让我们先来看看自动驾驶等级的分类
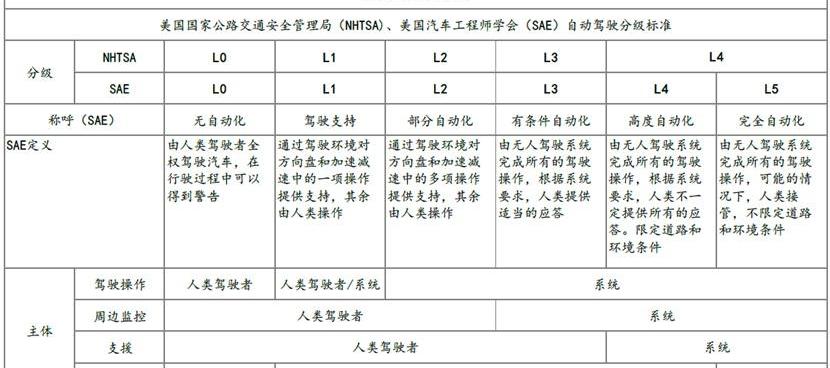
目前,大多数汽车公司都可以提供L2级别的系统。L0级驾驶员能够完全控制车辆;L1级自动系统有时可以帮助驾驶员完成某些驾驶任务;
L2级自动系统可以完成某些驾驶任务,但驾驶员需要监控驾驶环境,完成剩余部分,并确保出现任何问题,并随时接管。在这个级别上,自动系统的错误感知和判断可以由驾驶员随时纠正,大多数车企都可以提供这个系统。简单地说,驾驶员的手和眼睛可以暂时离开(手和眼睛温度关闭)。美国的L3级别要求略高于国内版本,L3是自动驾驶的分水岭。L3级别要求自动系统能够完成某些驾驶任务,并在某些情况下监控驾驶环境,但驾驶员必须做好重新获得驾驶控制权的准备。因此,在这个水平上,驾驶员仍然无法入睡或深度休息。简单地说,在L3级别,你可以松开你的手和眼睛,但你不能深度休息。中国的自动驾驶分类标准是基于某些特定场景,在这些场景中,人们可以放开自己的手和眼睛。因此,自动驾驶路径上的高精度地图基本服务于L3及以上级别,自动驾驶级别从L0到L5不等,技术难度不断升级。从导航和ADAS等应用,它们已经发展到自动驾驶等条件自动驾驶,再到Robotaxi等更先进的自动驾驶。不同阶段的自动驾驶产品形式对定位精度和地图有不同的要求。
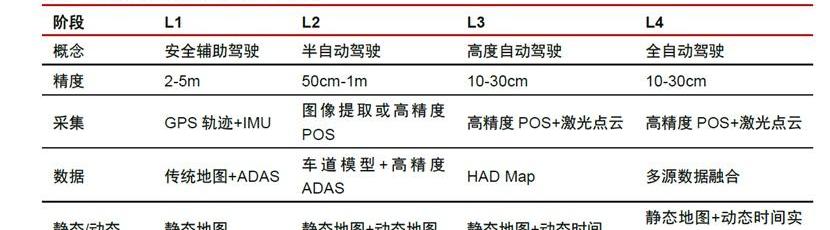
从上图可以看出,L1级别的普通电子地图可以满足要求,正常定位精度为2-5米。对于L3及以上级别的自动驾驶,高精度地图是标准配置。对于L3及以上的自动驾驶功能来说,高精度地图提供的实时准确的自我定位信息和动态道路信息必不可少,这已成为市场共识。我们可以看到,在L2辅助驾驶的真正意义上,这部分地图的精度要求相当高。在这里,需要50厘米到1米的精度,这是传统地图无法实现的。然而,此时,高精度地图中的信息与L3的信息要求不同,但精度要求已经比L1高出10倍。我们可以看到,L3级以上地图的精度要求在10-30cm之间,这与上面功能安全部分提到的≤25cm基本一致。此时,普通地图无法满足要求。

高精度地图是安全和冗余的,降低计算能力可能会导致一些精度误差。特斯拉的图像识别令人印象深刻,它也可以用于自动驾驶,而不需要激光雷达或高精度地图。它仍然可以做得很好。尽管我也是特斯拉的粉丝,对图像识别算法毫不怀疑,但如果没有高精度地图,软件算法能力将面临巨大挑战。我将举几个易于理解的例子。例如,在日本北海道,一到冬天,就会下大雪,甚至树木都是白色的。从视觉上看,众所周知,白色补丁缺乏纹理,目前的视觉方法很可能已经过时。人们开车并不容易,但它是可以驾驶的。你可以通过起伏、绿化带和其他因素来判断车道。你可以顺着你面前的车辙走。烧香炫耀祖先的视觉效果是什么?你努力训练的交通标志模型是否正确地将车辙识别为车道线?此外,在许多特殊情况下,道路上的许多视觉目的都需要车道边界。然而,在农村地区,一些道路根本没有这些标记。如果没有前车跟车或高精度地图定位,很难识别自己的车辆在哪条车道上,基本上只能退出辅助驾驶。通过观看自动驾驶评估的视频,我们比较的场景之一是高曲率的曲线测试,看看自动驾驶是否会退出。基本上,特斯拉、小鹏和NIO都有很高的故障率,尤其是在特斯拉故障率较高的高曲率曲线上。

以特斯拉Model 3上使用的三个摄像头为例,其中一个是远摄摄像头,检测距离为o……
250米;一种是检测距离为150米的中程相机;一种广角相机,检测距离为60米,但检测角度为120度。

对于只有一个摄像头的型号,该摄像头只能是同时考虑检测距离和检测角度的中程摄像头。然而,当通过一些高曲率的曲线时,这种相机的检测能力相对困难。有限的检测角度导致相对有限的检测范围。要通过高曲率曲线,系统需要对盲点中的车道线具有一定的预测能力,并根据实时检测到的信息不断调整预测路线。反映在实际表现中,还有两种结果:当曲率过大时直接放弃,协助驾驶员退出,或者系统根据检测结果不断修正车辆的行驶轨迹,导致车辆转弯时有更明显的锯齿感。对于使用高精度地图的辅助驾驶,这些都是已知信息。例如,凯迪拉克CT6可以预测前方2.5公里道路的曲率、坡度、限速和其他信息,因此在通过大曲率曲线时表现得更加冷静。如果纯粹基于图像进行识别,则需要大量的计算能力,以及强大的云训练、本地推理和匹配5G传输速度以实现快速传输,这也是一条路径。总之,仅仅依靠自行车感知需要更高的辅助驾驶识别和检测能力。然而,如果在识别能力上没有更大的突破,那么借用外部资源来提供更好的用户体验也是一个很好的方法。
0
经过多年的技术实践,高精度地图的三大功能在业内达成共识:单纯依靠车辆自身传感器和车辆自身处理器采集的信息,很难实现和推广自动驾驶。特斯拉在自动驾驶实验中发现,路面上细微的凸起或凹陷很容易导致自动驾驶系统的误判和错误响应,而包含准确道路信息的地图可以很好地解决此类问题。此前在中国举行的自动驾驶比赛的获胜者高度依赖比赛场地的详细地图,这也证明,如果没有准确的地图信息,自动着陆很难实现。高精度地图主要有以下三个功能:地图匹配、辅助环境感知和路径规划。高精度地图可以准确定位车道上的车辆,帮助车辆获得更准确、有效和全面的当前交通状况,并为无人车规划制定最佳路线。地图匹配:由于各种定位误差,在电子地图坐标上移动的车辆无法与周围地形保持正确的位置关系。使用高精度地图匹配可以准确定位车道上的车辆,从而提高车辆定位的准确性。辅助环境感知:这在自动驾驶中非常重要,因为不同的传感器有各自的优势和劣势。例如,相机发现在低光照和高对比度光照条件下很难捕获足够的视觉信息;激光雷达在雾、雨滴、雪花、汽车尾气和反射等场景中容易形成假点;
毫米波雷达探测的可信度在隧道和桥梁等场景中会降低。由于其高度复杂和安全第一的特点,自动驾驶需要融合多个传感器数据来提高感知效果。
1
无论传感器类型如何,检测距离和时间都有限制,需要集成多个传感器。但是,不排除在复杂的驾驶环境面前,传感器可能会出现故障。然而,作为智能驾驶唯一的超程传感器,地图突破了空间和时间的限制,可以说是通过定位实现的智能驾驶的“知识图谱”。自动驾驶功能安全的本质是提供冗余保护,补充传感器无法检测到的部分,监控实时情况,并提供外部信息反馈。作为自动驾驶的眼睛,传感器有其局限性,例如易受恶劣天气条件的影响。此时,可以使用高精度地图来获得当前位置的准确交通状况。路径规划:为了让自动驾驶汽车在驾驶过程中对其他车辆的行为做出及时、准确的反应,确保舒适性和安全性,算法需要对其他汽车的行为和路径做出相对准确的预测。对于预先规划的最优路径,由于实时更新的交通信息,最优路径也可能随时发生变化。此时,借助云计算的高精度地图可以有效地为无人车提供最新的路况,帮助其重新定义最佳路径。在路径规划方面,这些功能将在使用高精度地图的车辆上进行优化,对改善用户体验起到至关重要的作用。?自动切换车道?自动超越速度较慢的车辆?巡航速度的智能设置?坡道的自动进出,例如,当无人车通过一些坡道时,带有坡度信息的高精度地图也可以让车辆尽早规划速度。或者,当你需要通过弯道时,高精度地图可以为自动驾驶汽车提前提供弯道的曲率信息,使他们能够为弯道规划最合适的转弯速度。例如,如果使用高精度地图来查询右前方有辅助道路入口或车道合并的情况,那么在场的车辆很可能会向左变道或加速合并。根据左右车道线的实际情况,也可以更好地帮助自动驾驶汽车确定旁边拥堵的可能性。这更符合自然驾驶人进出匝道时的行为,而不是按照惯例提前2公里进入右侧车道。然而,由于右侧有大量卡车,行驶速度非常慢,这非常令人不快。然而,通过高精度的地图,综合决策更像是一位经验丰富的司机的操作,他可以根据实际的交通流量情况选择合适的时间进入正确的车道,既不太慢也不太快,无法在十字路口合并。因此,从以上信息可以得出结论,L3及以下不需要高精度地图,L3+必须使用高精度地图。高精度地图不仅比传统地图具有更高的精度,而且包含更全面的信息,更实时。END-前几期推荐的自动驾驶高精度地图定位。用于自动驾驶的高精度地图,从普通地图过渡到高精度地图。什么是自动驾驶的高精度地图?每次你点赞和评论,转发,都是对我的肯定。谢谢!本文首发于微信公众号:Po 1990。文章内容属于作者个人观点,不代表和讯网络的立场。投资者应据此操作,并承担风险。
新浪科技讯5月16日午间消息,今日,特斯拉客户支持微博发文称,关于5月14日杭州某地下车库发生的事故,其在获知该事故信息后,立即与车主取得了联系。
1900/1/1 0:00:00盖世汽车讯5月14日,本田汽车表示,得益于成本降低,该公司第四财季扭亏为盈,增长近20亿美元,但警告称,芯片短缺和原材料涨价可能限制2021财年的业绩增长。
1900/1/1 0:00:00新博弈原创文丨知宴编辑丨雷云霆近日,奔驰发布了一款名为EQT的概念新车。
1900/1/1 0:00:00文丨吴大郎出品丨牛刀财经与贾跃亭不欢而散后,许家印正式宣布恒大自己造车。在新造车势力纷纷因为缺钱哀鸿遍野的今天,以房养车不差钱的许家印入局前景受人关注。
1900/1/1 0:00:00电池是电瓶车的核心部件,由于电池原材料价格上涨,电瓶车成本也跟着上扬。5月17日消息,有记者探访了位于浙江湖州市长兴县的一个规模较大的电池生产企业。
1900/1/1 0:00:00日前,有媒体在网上曝光了一张疑似改款理想ONE的内饰谍照,新车在内饰设计上进行了调整。据悉,新车新增和改进60余项,更多的是集中在细节方面。
1900/1/1 0:00:00