不久前,小鹏汽车在小规模公测中正式启动了P7车型的新一轮OTA升级,其中NGP自动导航辅助驾驶也将首次向用户开放。NGP自动导航功能的核心是高精度地图和高精度定位,但很多人对什么是高精度映射感到困惑。今天,我们将为大家揭开这些高大上的专业词汇,看看什么是高精密地图。
此前,我们的同事对小鹏P7的NGP功能有相当详细的体验(参数|查询)。感兴趣的朋友可以点击下面的图片进行跳转。

事实上,在理解高精度地图之前,我认为有必要先了解电子地图导航的历史和迭代。我们根据功能和用途将电子地图导航分为三代。

第一代电子导航主要使用二维平面地图。有些朋友可能还记得,在使用第一代导航软件时,需要将每个城市的地图数据下载到本地位置,并使用本地芯片计算路径规划以获得结果。可以完成从点A到点B的行程,但计算逻辑基本上只考虑距离和道路财产。

当电子地图导航出现第二代时,即目前我们广泛使用的电子地图导航。本地数据开始联网,大数据和云计算也逐渐引入。同样,当从A点行驶到B点时,导航涉及到越来越多的问题,包括道路是否拥堵,以及是否选择最短距离或最短时间的路线。此外,随着地图精度的提高,当经过岔路口时,导航也会弹出道路图像并引导路线。

当电子导航发展到第三代时,我们今天要说的就是高精度地图。未来,高精度地图将更多地用于支持车辆的自动驾驶功能。目前,我们在市场上销售的大多数车辆都配备了L2级的主流自动驾驶功能。大多数车辆使用前置摄像头和毫米波雷达来确认车辆正前方可通行区域内是否有车辆。如果有车辆,它们会在安全制动距离内跟随。如果没有车辆,它们会加速到设定的巡航速度。该功能无法通过依赖现有的普通降低密度图来实现。毕竟,目前使用的降低密度地图的坐标精度约为5-10米,没有办法给出完美的平衡。
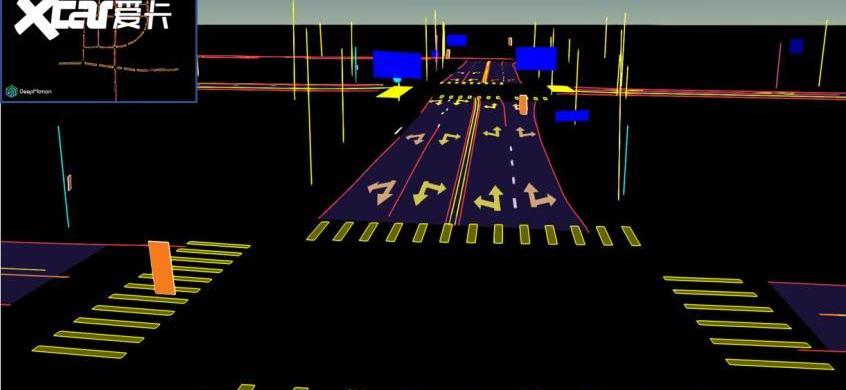
然而,高精度地图的绝对精度通常在亚米级。以高德地图为例,绝对精度可以达到10厘米以内,水平方向的相对精度往往更高。高精度地图不仅有高精度的坐标,而且有精确的道路形状,包括每条车道的坡度、曲率、航向、高程和侧倾数据。

此外,将描述每条车道的位置和车道之间的车道线,无论是虚线、实线还是双黄线,线的颜色、道路的分隔带,甚至道路上的箭头和文本。为了自动驾驶,例如每条车道的速度限制,还应该提供建议的速度。“交通参与者的绝对地理坐标、物理尺寸和特征,如人行横道、道路标识、隔离带、限速标志、红绿灯和路边电话站,也包含在高精度数据中”。那么如何收集呢?

在一些城市,人们已经看到头顶着大型摄像头和采集设备的采集车,它们实际上肩负着当前高精度地图采集工作的主流。在车顶的采集装置中,除了可以看到广角摄像头……
笔记
拼音 双语对照我们的肉眼,里面还有陀螺仪等设备,可以检测道路坡度、曲率、航向、高程和侧倾等数据。采集车采集信息并绘制矢量图时,经过一系列精密叠加处理即可完成。除了常规的道路采集,无人机采集现在开始加入高精度测绘的行列。此前,中海达联合极飞、天机航空推出了航空测绘一体化解决方案“依图”,利用无人机进行测绘。中海达拥有北斗卫星背书,并于2016年投资3600万元与武汉广庭、中海庭成立合资公司。然而,目前中海庭51%的股份由上汽集团持有。而且,上汽集团也已经开始与GADE在高精度地图领域展开合作,因此上汽集团未来不必担心高精度地图的应用。高精度地图对自动驾驶有多大影响?此前,网上流传着一个故事,福特曾在一次自动驾驶测试中发现,同一批次的每辆无人驾驶测试车都会在车道上的同一位置轻微转弯,似乎是为了避免地面上的不规则现象。在研究了这辆车并进行了物理调查后,发现问题实际上并不是来自汽车,而是来自地图。“因为测试时地图刚刚更新,地图上出现了数值误差,导致防撞点位置的误差参数升高,实际上地面是完全平坦的”。因此,高精度地图的准确性极大地影响了未来装配自动驾驶功能的安全性和丰富性。
笔记
拼音 双语对照
在2019广州车展开幕之际,爱卡汽车前方探馆团队拍摄到一组威马EX6参数询价Plus的实车图片。
1900/1/1 0:00:00如果你问我2021年摩托车行业中最为劲爆的消息是什么,那我的回答肯定是KTM790DUKECKD版车型的上市。
1900/1/1 0:00:00又到了周末,爱卡汽车新一期的周末车闻也如约而至。本周威马EX5参数询价Z、零跑T03参数询价、江淮iC5参数询价的上市支撑起了全新车型阵容。
1900/1/1 0:00:00新能源的崛起,让全球汽车生态变得愈发精彩。日本人纠结于混动还是电动,欧洲人抱着插电混动不舍放手,中国和美国则早早确立了纯电动技术路线。
1900/1/1 0:00:00随着互联网、大数据、云计算、人工智能等新一代信息技术的快速发展,传统产业都面临着数字化转型,作为国民经济支柱的汽车产业更是如此。
1900/1/1 0:00:00作为大阳电动化转型的重要环节,2017年我们迎来了E客品牌的全新发布,与新品牌同一时间诞生的还有一款十分重要的车型E客E1。
1900/1/1 0:00:00