出于安全考虑,自动驾驶汽车必须能够准确跟踪周围行人、自行车和其他车辆的运动。现在,据国外媒体报道,卡内基梅隆大学开发了一种新方法,可以更高效地训练这种跟踪系统。
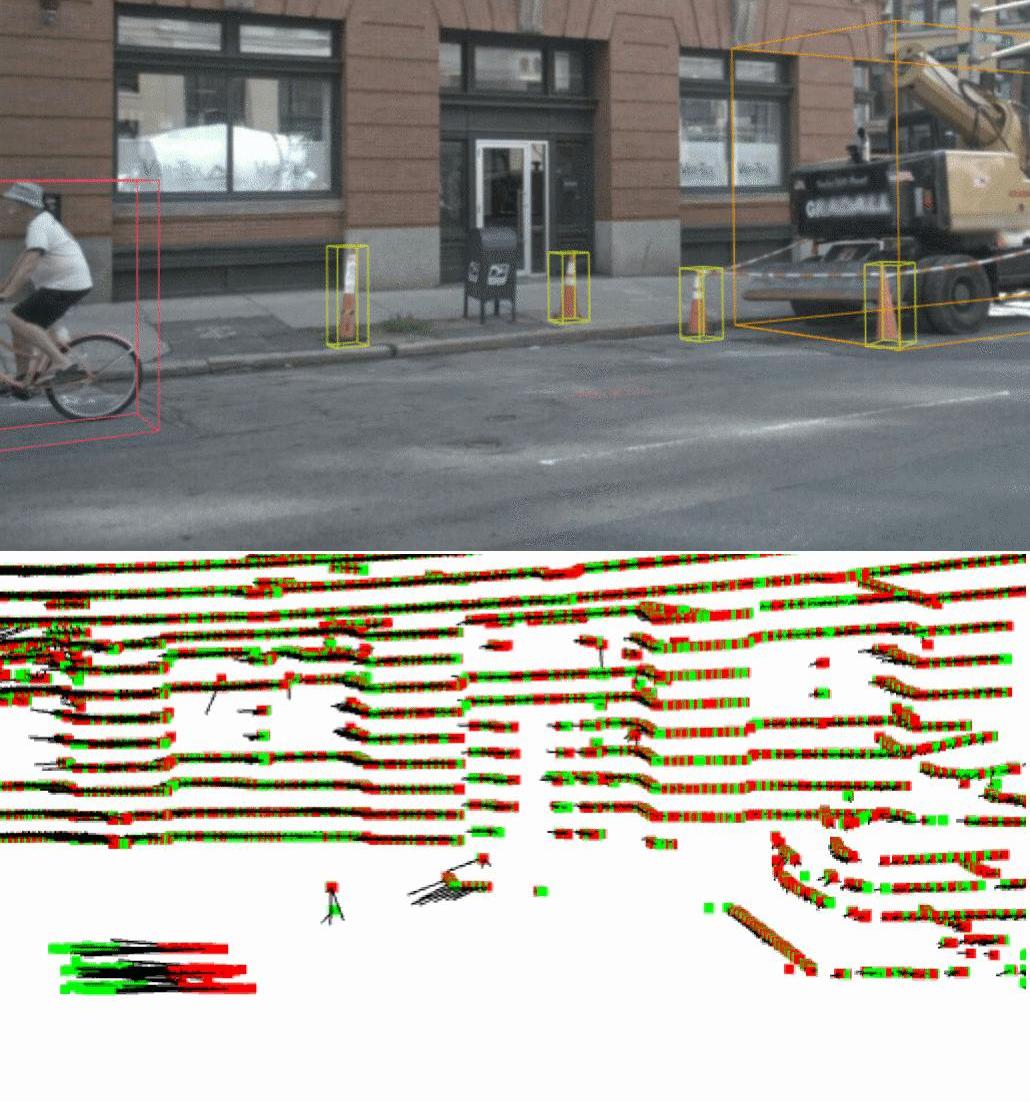
(图片来源:卡内基梅隆大学)一般来说,使用越多的道路数据和交通数据来训练跟踪系统,结果会越好。为此,卡内基梅隆大学的研究人员开发了一种新方法来解锁大量自动驾驶数据。大多数自动驾驶汽车主要依靠一种叫做激光雷达的传感器进行导航。激光雷达是一种产生关于车辆周围环境的3D信息的激光设备。这个3D信息不是图像,而是点云。车辆使用一种称为场景流的技术来理解这种数据,其中包括计算每个3D点云的速度和轨迹。一起运动的点云组被解释为车辆、行人或其他运动物体穿过场景流。在过去,训练这种系统的最先进的方法是使用标记数据集。这种传感器数据已被注释,并将随着时间的推移跟踪每个3D点云。而人工标注这样的数据集既费力又费钱,所以几乎没有标注的数据。相反,场景流训练通常是用模拟数据进行的,效率较低,然后会用少量标注的真实数据进行微调。卡内基梅隆大学的研究人员采用了一种不同的方法,使用未标记的数据进行场景流训练。因为在车上安装激光雷达,开着车到处跑,生成无标签数据相对简单,不会出现数据短缺的情况。这种方法的关键是开发一种方法,使系统能够检测自己在场景流中的错误。在每个时刻,系统都试图预测每个3D点云的移动方向和速度。在下一个时刻,系统可以测量出预测点云位置与预测点云位置附近最近的实际位置之间的距离,这是一个误差,需要尽可能的减小。然后,系统将反向处理,从预测的点云位置开始,向后映射点云的起始位置。因此,预测位置和实际开始位置之间的距离被测量,导致第二误差。然后,系统会纠正这些错误。虽然听起来很复杂,但研究人员发现这种方法非常有效。研究人员计算出,使用合成数据训练集进行场景流训练的准确率仅为25%。当使用少量真实世界标记数据对合成数据进行微调时,准确率提高到31%;当加入大量未标记数据用他们的方法训练系统时,场景流的准确率跃升至46%。出于安全考虑,自动驾驶汽车必须能够准确跟踪周围行人、自行车和其他车辆的运动。现在,据国外媒体报道,卡内基梅隆大学开发了一种新方法,可以更高效地训练这种跟踪系统。
(图片来源:卡内基梅隆大学)一般来说,使用越多的道路数据和交通数据来训练跟踪系统,结果会越好。为此,卡内基梅隆大学的研究人员开发了一种新方法来解锁大量自动驾驶数据。大多数自动驾驶汽车主要依靠一种叫做激光雷达的传感器进行导航。激光雷达是一种产生关于车辆周围环境的3D信息的激光设备。这个3D信息不是图像,而是点云。车辆使用一种称为场景流的技术来理解这种数据,其中包括计算每个3D点云的速度和轨迹。一起运动的点云组被解释为车辆、行人或其他运动物体穿过场景流。在过去,训练这种系统的最先进的方法是使用标记数据集。这种传感器数据已被注释,并将随着时间的推移跟踪每个3D点云。而人工标注这样的数据集既费力又费钱,所以几乎没有标注的数据。相反,场景流训练通常是用模拟数据进行的,效率较低,然后会用少量标注的真实数据进行微调。卡内基梅隆大学的研究人员采用了一种不同的方法,使用未标记的数据进行场景流训练。因为在车上安装激光雷达,开着车到处跑,生成无标签数据相对简单,不会出现数据短缺的情况。这种方法的关键是开发一种方法,使系统能够检测自己在场景流中的错误。在每个时刻,系统都试图预测每个3D点云的移动方向和速度。在下一个时刻,系统可以测量出预测点云位置与预测点云位置附近最近的实际位置之间的距离,这是一个误差,需要尽可能的减小。然后,系统将反向处理,从预测的点云位置开始,向后映射点云的起始位置。因此,预测位置和实际开始位置之间的距离被测量,导致第二误差。然后,系统会纠正这些错误。虽然听起来很复杂,但研究人员发现这种方法非常有效。研究人员计算出,使用合成数据训练集进行场景流训练的准确率仅为25%。当使用少量真实世界标记数据对合成数据进行微调时,准确率提高到31%;当加入大量未标记数据用他们的方法训练系统时,场景流的准确率跃升至46%。
标签:发现
据外媒INSIDEEVs消息,宝马日前正式宣布了与Northvolt的锂离子电池长期供应合同,价值约20亿欧元,折合人民币约159亿元人民币。
1900/1/1 0:00:007月13日,长城汽车发布关于获得政府补助的公告。
1900/1/1 0:00:00近日,德国慕尼黑法院表示,计划于下周就该特斯拉的自动驾驶技术是否存在误导消费者的问题作出裁决。特斯拉曾公开表示,特斯拉汽车完全有可能实现自动驾驶,还宣传在2019年底前具备城市道路的自动驾驶能力。
1900/1/1 0:00:00近日,据外媒报道,通用汽车决定放弃最初制定的燃料电池电池汽车计划,即将推出的首批电动汽车,即悍马电动汽车(GMCHummerEV)和凯迪拉克Lyriq(CadillacLyriq),
1900/1/1 0:00:00今日(7月17日),孚能科技正式在上海证券交易所科创板上市,公司证券代码为688567,发行价格159元股,对应市值约17024亿元。
1900/1/1 0:00:00据外媒报道,除了在电动汽车(EV)电池领域建立合作外,三星和现代汽车的高管们还在讨论在汽车电子市场中建立合作的可能性。
1900/1/1 0:00:00