摄像头作为智能汽车AI视觉算法系统中最重要的传感器之一,作为人眼的延伸,不仅需要看得清楚,还需要看得准确。因此,如何在环境感知的过程中,进一步提高摄像头的性能,提高整个AI视觉算法的精度,成为业界普遍关注的问题。
目前仅依靠摄像头制造工艺和车内摄像头安装的一致性,很难满足AI视觉算法对摄像头精度的要求。相比之下,摄像机生产过程中内部参数的标定可以更好地提高AI视觉算法的精度,因此正逐渐成为解决这类问题的重要手段之一。ADAYO华阳数码特有的“御眼”技术,可以在生产线上快速准确的标定相机内参数,并将内保存储在相机中,进一步提高了相机AA过程中相机的精度,从而保证ADAS应用的算法精度,提升用户体验。
相机感知误差受多种因素影响。
在试图提高摄像头的精度之前,我们首先要了解哪些因素会影响摄像头的感知精度。总的来说,主要有两个原因:
1.受相机本身的一致性影响,包括镜头误差和装配误差。
相机镜头的▅误差:是由镜头中的镜头加工误差和镜头装配误差引起的,通常有两种问题(以像素尺寸为3微米的100万像素相机为例,下同):
对焦误差:主流镜头的对焦误差规格为5%,只考虑一个对焦误差,比如1mm的焦距变化5%,主光角度为20度,就会出现6个像素的误差;
镜头畸变误差:镜头厂商一般可以向相机模组厂商提供径向畸变曲线,一般是镜头的测试平均值或理论设计值,每个镜头的实际畸变会与此有一定偏差;另外,虽然ADAS镜头的畸变主要是径向畸变,但畸变曲线只能反映径向畸变,不能反映镜头的切向畸变,镜头的切向畸变一定程度上存在,严重时会达到2个像素的误差水平,降低了相机的精度和一致性。
▅相机装配误差:主要是光学中心偏差:相机传感器中心与镜头光轴不重合。虽然高清相机一般都采用AA(主动对准)技术,但一般只有这种技术才能保证5个像素的光学中心。
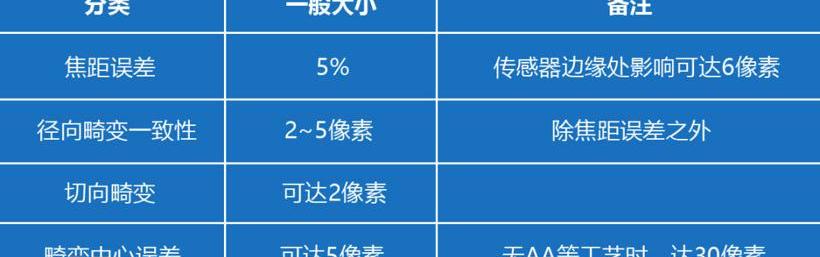
▅通用相机主要几何误差尺寸:
以水平视角120度,焦距1 mm,像素尺寸3微米为例。
以上误差都与相机内部参数有关。
2.受车内摄像头安装一致性的影响。
摄像头外壳定位结构的精度、摄像头安装支架的精度、汽车结构本身的精度都会影响摄像头的安装角度和位置。综合这些因素,很可能会出现2度的角度误差。
虽然这个因素是摄像机的外参考,但是要精确标定摄像机的安装误差,首先也要求摄像机的内参考准确。
“吸睛技术”助力AI视觉算法优化
AI算法通过标定摄像机的内部参与和外部参数,可以大大消除上述误差的影响。如果摄像机本身的内部参数与理论内部参数存在误差,或者同批次摄像机的内部参数数据是离散的,都会给AI算法的精确标定带来困难。
华阳数码特有的“御颜”技术,采用独特的中心点算法和其他参数优化算法,可以稳定准确地在线测量相机内部参数,并将内部参数写入相机,从而满足在线操作的节拍速度,在线校准每台相机。ADAS算法可以直接读取写入摄像头的内部参数,并通过算法进行有效补偿,从而实现精确的物体图像测距、识别和定位,提高AVP、APA、FCW、LDW、DMS、OMS等应用领域的算法精度,为车主提供更好的用户体验。
“宇燕技术”在ADAS中的应用
1.在AVP、APA、AVM、VSLAM、FCW、BSD、PCW、AEB等应用中。,需要使用摄像机判断距离(有时辅助其他传感器判断距离)或者图像拼接,对摄像机物体的位置对应性有很高的要求。摄像机内部参数的精确标定和摄像机之间差异的修正可以大大提高算法的准确性,从而改善用户体验。
摄像机内部的几何误差(以像素表示)和汽车中的摄像机安装误差(以角度表示)都可以归因于角度误差。
如果摄像机的安装高度为1.3米,摄像机的误差为1度,那么在地面上的测距误差将为:
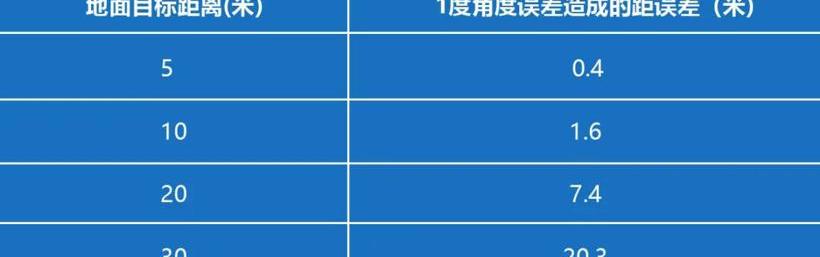
摄像机安装位置越低,离地面目标越远,测距误差越大。
从上面的计算可以看出,相机成像的几何精度对于判断地面物体的距离非常重要。“玉颜”技术可以在整个视野范围内将中心偏差和畸变一致性控制在2个像素以内。
2.在LDW、DMS、OMS、TSR等以目标识别为主的应用中,尤其是使用机器学习算法时,通过“御眼”技术标定的相机内参可以有效消除成像畸变,明显提高算法的识别精度。这是因为在机器学习的训练中,一般使用无畸变或畸变小的镜头采集的训练图像数据。在实际使用中,如果使用FOV大于100度的摄像头,图像畸变较大,会降低识别率,从而影响AI视觉算法的准确性。
目前,在工业中,通常通过使用固定的参数通过……来进行失真校正相机中ISP(图像处理器)的能力。但是ISP的畸变校正能力非常有限:一般径向畸变无法完全校正(比如校正后仍有10%左右的畸变),一般切向畸变无法校正,畸变中心无法校正。这种方法离AI视觉算法要求的摄像机鱼眼畸变小于1%的目标还有很大距离。
以下是使用“宇燕”技术校准内部参考和应用内部参考进行失真校正之前和之后的相机图像比较:

(采用“宇燕”技术确定内参后,失真率可控制在0.5%以下。从图中我们可以看到,校正后地板的经纬线是水平和垂直的。)
ADAYO华阳数码特别推出的“吸睛”技术的理念是,用最精准的AI传感器助推自动驾驶技术,带来美好的科技生活享受。自2019年推出以来,“吸睛”技术已获得包括百度在内的多家知名自动驾驶公司的认可,并在多个车厂项目中落地。最新进展是搭载百度AVP自动泊车的威马W6车型,均采用华阳数码具有“吸睛”技术的专用摄像头,为威马W6车型在特定场景下的无人驾驶技术保驾护航。此外,华阳数码特有的“御眼”技术也已在百度最新的基于纯视觉的自动驾驶技术ANP(飞行员辅助驾驶技术,达到L4的技术水平)和江淮新能源的DMS项目中落地,“御眼”技术的应用领域已扩展到自动驾驶技术的多个应用领域。
作为ADAYO华阳集团汽车电子业务的重要力量之一,华阳数码愿携手更多自动驾驶技术和合作伙伴,共同探讨“宇燕”技术在自动驾驶领域的无限可能,期待与更多自动驾驶技术厂商和主机厂合作,为广大车主提供美好的科技生活。摄像头作为智能汽车AI视觉算法系统中最重要的传感器之一,作为人眼的延伸,不仅需要看得清楚,还需要看得准确。因此,如何在环境感知的过程中,进一步提高摄像头的性能,提高整个AI视觉算法的精度,成为业界普遍关注的问题。
目前仅依靠摄像头制造工艺和车内摄像头安装的一致性,很难满足AI视觉算法对摄像头精度的要求。相比之下,摄像机生产过程中内部参数的标定可以更好地提高AI视觉算法的精度,因此正逐渐成为解决这类问题的重要手段之一。ADAYO华阳数码特有的“御眼”技术,可以在生产线上快速准确的标定相机内参数,并将内保存储在相机中,进一步提高了相机AA过程中相机的精度,从而保证ADAS应用的算法精度,提升用户体验。
相机感知误差受多种因素影响。
在试图提高摄像头的精度之前,我们首先要了解哪些因素会影响摄像头的感知精度。总的来说,主要有两个原因:
1.受相机本身的一致性影响,包括镜头误差和装配误差。
相机镜头的▅误差:是由镜头中的镜头加工误差和镜头装配误差引起的,通常有两种问题(以像素尺寸为3微米的100万像素相机为例,下同):
对焦误差:主流镜头的对焦误差规格为5%,只考虑一个对焦误差,比如1mm的焦距变化5%,主光角度为20度,就会出现6个像素的误差;
镜头畸变误差:镜头厂商一般可以向相机模组厂商提供径向畸变曲线,一般是镜头的测试平均值或理论设计值,每个镜头的实际畸变会与此有一定偏差;另外,虽然ADAS镜头的畸变主要是径向畸变,但畸变曲线只能反映径向畸变,不能反映镜头的切向畸变,镜头的切向畸变一定程度上存在,严重时会达到2个像素的误差水平,降低了相机的精度和一致性。
▅相机装配误差:主要是光学中心偏差:相机传感器中心与镜头光轴不重合。虽然高清相机一般都采用AA(主动对准)技术,但一般只有这种技术才能保证5个像素的光学中心。
▅通用相机主要几何误差尺寸:
以水平视角120度,焦距1 mm,像素尺寸3微米为例。
以上误差都与相机内部参数有关。
2.受车内摄像头安装一致性的影响。
摄像头外壳定位结构的精度、摄像头安装支架的精度、汽车结构本身的精度都会影响摄像头的安装角度和位置。综合这些因素,很可能会出现2度的角度误差。
虽然这个因素是摄像机的外参考,但是要精确标定摄像机的安装误差,首先也要求摄像机的内参考准确。
“吸睛技术”助力AI视觉算法优化
AI算法通过标定摄像机的内部参与和外部参数,可以大大消除上述误差的影响。如果摄像机本身的内部参数与理论内部参数存在误差,或者同批次摄像机的内部参数数据是离散的,都会给AI算法的精确标定带来困难。
华阳数码特有的“御颜”技术,采用独特的中心点算法和其他参数优化算法,可以稳定准确地在线测量相机内部参数,并将内部参数写入相机,从而满足在线操作的节拍速度,在线校准每台相机。ADAS算法可以直接读取写入摄像头的内部参数,并通过算法进行有效补偿,从而实现精确的物体图像测距、识别和定位,提高AVP、APA、FCW、LDW、DMS、OMS等应用领域的算法精度,为车主提供更好的用户体验。
“宇燕技术”在ADAS中的应用
1.在AVP、APA、AVM、VSLAM、FCW、BSD、PCW、AEB等应用中。,需要使用摄像机判断距离(有时辅助其他传感器判断距离)或者图像拼接,对摄像机物体的位置对应性有很高的要求。摄像机内部参数的精确标定和摄像机之间差异的修正可以大大提高算法的准确性,从而改善用户体验。
摄像机内部的几何误差(以像素表示)和汽车中的摄像机安装误差(以角度表示)都可以归因于角度误差。
如果摄像机的安装高度为1.3米,摄像机的误差为1度,那么在地面上的测距误差将为:
摄像机安装位置越低,离地面目标越远,测距误差越大。
从上面的计算可以看出,相机成像的几何精度对于判断地面物体的距离非常重要。“玉颜”技术可以在整个视野范围内将中心偏差和畸变一致性控制在2个像素以内。
2.在LDW、DMS、OMS、TSR等以目标识别为主的应用中,尤其是使用机器学习算法时,通过“御眼”技术标定的相机内参可以有效消除成像畸变,明显提高算法的识别精度。这是因为在机器学习的训练中,一般使用无畸变或畸变小的镜头采集的训练图像数据。在实际使用中,如果使用FOV大于100度的摄像头,图像畸变较大,会降低识别率,从而影响AI视觉算法的准确性。
目前,在工业中,通常通过使用固定的参数通过……来进行失真校正相机中ISP(图像处理器)的能力。但是ISP的畸变校正能力非常有限:一般径向畸变无法完全校正(比如校正后仍有10%左右的畸变),一般切向畸变无法校正,畸变中心无法校正。这种方法离AI视觉算法要求的摄像机鱼眼畸变小于1%的目标还有很大距离。
以下是使用“宇燕”技术校准内部参考和应用内部参考进行失真校正之前和之后的相机图像比较:
(采用“宇燕”技术确定内参后,失真率可控制在0.5%以下。从图中我们可以看到,校正后地板的经纬线是水平和垂直的。)
ADAYO华阳数码特别推出的“吸睛”技术的理念是,用最精准的AI传感器助推自动驾驶技术,带来美好的科技生活享受。自2019年推出以来,“吸睛”技术已获得包括百度在内的多家知名自动驾驶公司的认可,并在多个车厂项目中落地。最新进展是搭载百度AVP自动泊车的威马W6车型,均采用华阳数码具有“吸睛”技术的专用摄像头,为威马W6车型在特定场景下的无人驾驶技术保驾护航。此外,华阳数码特有的“御眼”技术也已在百度最新的基于纯视觉的自动驾驶技术ANP(飞行员辅助驾驶技术,达到L4的技术水平)和江淮新能源的DMS项目中落地,“御眼”技术的应用领域已扩展到自动驾驶技术的多个应用领域。
作为ADAYO华阳集团汽车电子业务的重要力量之一,华阳数码愿携手更多自动驾驶技术和合作伙伴,共同探讨“宇燕”技术在自动驾驶领域的无限可能,期待与更多自动驾驶技术厂商和主机厂合作,为广大车主提供美好的科技生活。
4月9日,全球首个汽车SOA开发者大会上汽零束SOA平台开发者大会在沪盛大揭幕。
1900/1/1 0:00:00由iDigitalChina举办,中国国际贸易促进委员会汽车行业分会战略支持的ADMIC汽车数字化amp营销创新峰会暨金璨奖颁奖盛典于2021年3月26日在上海完美落幕。
1900/1/1 0:00:004月9日,特斯拉官方宣布其在中国市场3月销量为35478辆,同比增长207,再次刷新中国市场单月销量最高纪录。
1900/1/1 0:00:001、雷军公布小米首款车售价4月6日,在小米召开的米粉“OpenDay”上,小米集团CEO雷军在直播中再次回应了造车计划,表示:“愿意全力以赴为米粉造好车”。
1900/1/1 0:00:00作为汽车行业的新玩家,宝能汽车集团自成立以来一直以科技为引领力,以创新为驱动力,实现高质量发展,稳中求进,通过不断的核心技术积累,并一步步走到了今天,在成立短短不到4年的时间里,
1900/1/1 0:00:00每周一更,不见不散,新能源周刊汇集本周精彩内容,一次看过瘾本周比亚迪秦PLUSEV正式上市,点燃中国风元素,价格实惠续航足;成本大比拼ModelY、蔚来ES6、宝马X3一决高下;
1900/1/1 0:00:00