随着科技的不断发展,自动驾驶技术也越来越成熟。车辆通过感知周围的世界来自主导航,但这一切都是建立在车辆定位的准确性和安全性的承诺和保证上。为了实现自动驾驶汽车的各种复杂功能,准确可靠的位置信息变得不可或缺。

拥挤的城市峡谷环境给自动驾驶汽车的传感器阵列带来了巨大的挑战。当自动驾驶汽车在失去GPS/GNSS信号的情况下试图左转时,IMU技术开始凸显其重要作用。
传感传感器作为自动驾驶决策的主要信息源,可以感知车辆周围的世界。包括雷达、激光雷达、红外、超声波、相机视觉,但都需要强大的计算能力作为支撑。
导航系统可以告诉自动驾驶汽车他们在哪里,他们需要去哪里。这些系统由GNSS/GPS接收机和INS(惯性导航系统)组成,惯性导航系统包括惯性运动传感器和来自里程表和转向传感器的输入。
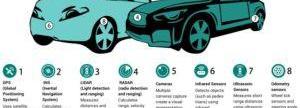
自动驾驶汽车常用的八种传感器
长期以来,基于MEMS的惯性传感器(如陀螺仪和加速度计)一直被用作车辆碰撞检测、安全气囊弹出和电子稳定控制中的分立元件。采用MEMS或光纤技术的高端IMU(惯性测量单元)通常用于飞机和战术制导系统,其性能比传统MEMS传感器高10到1000倍。
随着自动驾驶汽车技术和安全标准的进步和提高,IMU和INS要求的定位精度已经接近航天和战术装备标准——统一可靠的厘米级精度,而不是米级精度。
到现在为止,能达到这种性能和安全水平的IMU,对于汽车等大众市场来说还是很贵的。但现在我们看到了设计和制造方面的创新,这可以使高性能IMU技术在广泛的自动化应用和工业应用中更具价格优势。
为什么是IMU?
IMU是一种电子模块,集成了多个惯性传感器,可产生沿多个轴或自由度的加速度和角速度测量值。六自由度IMU由一个三轴陀螺仪和一个三轴加速度计组成。扩展卡尔曼滤波器(EKF)用于组合这些随时间变化的传感器的测量值,从而可以高精度地计算位置、速度、姿态或方向。AHRS结合磁力计读数和IMU数据来计算航向、滚动和俯仰。INS增加了GPS来追踪物体的位置、方向和速度。
在典型的自动驾驶汽车应用中,INS结合了交通路线、高清地图和传感传感器系统来确定车辆路线和如何导航。当所有系统在良好的环境条件和卫星覆盖下正常运行时,传统汽车IMU的INS通常可以提供足够的定位精度和可靠性,保证安全运行。
但是,外部条件往往并不理想。通常情况下,由于城市峡谷、隧道、立交桥、多径误差或卫星覆盖差,GPS信号会丢失或减弱。此外,车辆可能会遇到其他困难的条件,如降水或反射表面,这些条件可能会影响相机、激光雷达或雷达系统数据的性能和完整性。
当用于导航的其他传感器数据异常或因环境原因中断时,导航任务将转向航位推算系统。此时的自动驾驶系统主要依靠IMU、轮速传感器和视觉传感器。这时候,使用一个合适级别的IMU就显得尤为重要,无论环境条件如何,IMU都能持续感知并提供位置信息。
MEMS器件中固有的偏差和漂移误差会给系统带来一定的负担,需要及时消除。此外,没有得到补偿的误差会累积成位置误差,经过温度和时间严格校准的高端IMU可以大大减少这些误差源。内置冗余IMU可以提供更精确的位置估计,为整个自动驾驶汽车系统和传感器融合网络带来更高的安全性、完整性和可靠性。
关于……时间动力学
精密惯导定位的另一个显著发展趋势是GNSS RTK(卫星导航实时动态定位)技术的出现和发展。RTK和IMU数据适当融合后,GPS定位精度可以提高100倍,从米级精度提高到厘米级精度。RTK技术通过消除电离层和对流层延迟、多路径、卫星时钟和星历误差(由GPS接收机在位置计算中使用卫星位置引起的误差)来改进从GPS信号接收的位置数据。RTK系统使用测量级基站,通过蜂窝信号向移动台(移动物体或车辆)广播校正值。通过复合算法和卡尔曼滤波器,将修正后的数据与GPS和IMU数据融合,实时输出移动台的精确位置。

RTK定位和定位技术对于广泛的自动驾驶应用非常有价值,包括农业、建筑、机器人送货、无人机和消费者自动驾驶汽车。
到目前为止,RTK和其他类似的服务仍然需要高昂的价格和较长的获取时间。因此,它们主要用于农业、土地勘测和建筑应用。随着自动驾驶汽车的普及及其对精确定位的需求,一种新的可跨区域扩展的RTK软件诞生了。软件经济易集成,对自动驾驶汽车的传感器融合定位导航功能进行了优化和补充。
对于任何一辆自动驾驶汽车来说,知道自己的位置、周围环境、目的地以及如何准确到达是非常重要的。虽然无人驾驶汽车何时成为消费产品还不确定,但这项技术已经在一些行业得到了广泛应用。结合先进的IMU和RTK,有望进一步改善和提高系统性能、安全性和完整性,使惯性导航系统尽快普及。随着科技的不断发展,自动驾驶技术也越来越成熟。车辆通过感知周围世界来自主导航,但这一切都是建立在车辆定位的准确性和安全性的承诺和保证上。为了实现自动驾驶汽车的各种复杂功能,准确可靠的位置信息变得不可或缺。
拥挤的城市峡谷环境给自动驾驶汽车的传感器阵列带来了巨大的挑战。当自动驾驶汽车在失去GPS/GNSS信号的情况下试图左转时,IMU技术开始凸显其重要作用。
传感传感器作为自动驾驶决策的主要信息源,可以感知车辆周围的世界。包括雷达、激光雷达、红外、超声波、相机视觉,但都需要强大的计算能力作为支撑。
导航系统可以告诉自动驾驶汽车他们在哪里,他们需要去哪里。这些系统由GNSS/GPS接收机和INS(惯性导航系统)组成,惯性导航系统包括惯性运动传感器和来自里程表和转向传感器的输入。
自动驾驶汽车常用的八种传感器
长期以来,基于MEMS的惯性传感器(如陀螺仪和加速度计)一直被用作车辆碰撞检测、安全气囊弹出和电子稳定控制中的分立元件。采用MEMS或光纤技术的高端IMU(惯性测量单元)通常用于飞机和战术制导系统,其性能比传统MEMS传感器高10到1000倍。
随着自动驾驶汽车技术和安全标准的进步和提高,IMU和INS要求的定位精度已经接近航天和战术装备标准——统一可靠的厘米级精度,而不是米级精度。
到现在为止,能达到这种性能和安全水平的IMU,对于汽车等大众市场来说还是很贵的。但现在我们看到了设计和制造方面的创新,这可以使高性能IMU技术在广泛的自动化应用和工业应用中更具价格优势。
为什么是IMU?
IMU是一种电子模块,集成了多个惯性传感器,可产生沿多个轴或自由度的加速度和角速度测量值。六自由度(DOF)IMU包括……三轴陀螺仪和三轴加速度计。扩展卡尔曼滤波器(EKF)用于组合这些随时间变化的传感器的测量值,从而可以高精度地计算位置、速度、姿态或方向。AHRS结合磁力计读数和IMU数据来计算航向、滚动和俯仰。INS增加了GPS来追踪物体的位置、方向和速度。
在典型的自动驾驶汽车应用中,INS结合了交通路线、高清地图和传感传感器系统来确定车辆路线和如何导航。当所有系统在良好的环境条件和卫星覆盖下正常运行时,传统汽车IMU的INS通常可以提供足够的定位精度和可靠性,保证安全运行。
但是,外部条件往往并不理想。通常情况下,由于城市峡谷、隧道、立交桥、多径误差或卫星覆盖差,GPS信号会丢失或减弱。此外,车辆可能会遇到其他困难的条件,如降水或反射表面,这些条件可能会影响相机、激光雷达或雷达系统数据的性能和完整性。
当用于导航的其他传感器数据异常或因环境原因中断时,导航任务将转向航位推算系统。此时的自动驾驶系统主要依靠IMU、轮速传感器和视觉传感器。这时候,使用一个合适级别的IMU就显得尤为重要,无论环境条件如何,IMU都能持续感知并提供位置信息。
MEMS器件中固有的偏差和漂移误差会给系统带来一定的负担,需要及时消除。此外,没有得到补偿的误差会累积成位置误差,经过温度和时间严格校准的高端IMU可以大大减少这些误差源。内置冗余IMU可以提供更精确的位置估计,为整个自动驾驶汽车系统和传感器融合网络带来更高的安全性、完整性和可靠性。
实时动态
精密惯导定位的另一个显著发展趋势是GNSS RTK(卫星导航实时动态定位)技术的出现和发展。RTK和IMU数据适当融合后,GPS定位精度可以提高100倍,从米级精度提高到厘米级精度。RTK技术通过消除电离层和对流层延迟、多路径、卫星时钟和星历误差(由GPS接收机在位置计算中使用卫星位置引起的误差)来改进从GPS信号接收的位置数据。RTK系统使用测量级基站,通过蜂窝信号向移动台(移动物体或车辆)广播校正值。通过复合算法和卡尔曼滤波,将修正后的数据与GPS和IMU数据融合,实时输出移动台的精确位置。
RTK定位和定位技术对于广泛的自动驾驶应用非常有价值,包括农业、建筑、机器人送货、无人机和消费者自动驾驶汽车。
到目前为止,RTK和其他类似的服务仍然需要高昂的价格和较长的获取时间。因此,它们主要用于农业、土地勘测和建筑应用。随着自动驾驶汽车的普及及其对精确定位的需求,一种新的可跨区域扩展的RTK软件诞生了。软件经济易集成,对自动驾驶汽车的传感器融合定位导航功能进行了优化和补充。
对于任何一辆自动驾驶汽车来说,知道自己的位置、周围环境、目的地以及如何准确到达是非常重要的。虽然无人驾驶汽车何时成为消费产品还不确定,但这项技术已经在一些行业得到了广泛应用。结合先进的IMU和RTK,有望进一步改善和提高系统性能、安全性和完整性,使惯性导航系统尽快普及。
特斯拉太“难”了这边与站车顶维权女车主的“江湖恩怨”还没有完全解决,女车主行拘刚被释放,就立马向特斯拉发出了“大招”,而这边依旧是维权不断。
1900/1/1 0:00:00汽车向电气化、电动化转型,已经成为了全球汽车行业的大趋势。而传统燃油车,如今向电动化靠拢,早已落后于特斯拉和一众造车新势力车型。
1900/1/1 0:00:00日前,ARCFOX极狐品牌首个专属超充站在北京三环沿线宋家庄石榴中心投入试运营,首座超充站配备12个超充桩,单桩最大充电功率180kW,阿尔法S华为HI版可达到充电10分钟,
1900/1/1 0:00:00盖世汽车讯据外媒报道,3月,雷诺品牌全球纯电动车销量同比大增86,至9466辆,打破历史同期销量记录。此数据包括乘用纯电动车和商用纯电动车,但不包括Twizy和插电式混动车。
1900/1/1 0:00:00作者田大鹏4月19日,上海车展开幕前夕,捷豹路虎全球董事、捷豹路虎中国总裁和首席执行官潘庆接受了寰球汽车专访,
1900/1/1 0:00:00作者王鑫4月19日,北京梅赛德斯奔驰销售服务有限公司总裁兼首席执行官杨铭(JanMadeja)早早来到上海国家会展中心。
1900/1/1 0:00:00