8月26日,由Gaspar主办的“2021行业首届智能汽车域控制器创新峰会”在上海汽车城瑞丽酒店举行。为期两天的会议将重点讨论智能汽车、智能驾驶域控制器、智能驾驶舱域控制器、底盘和车身域控制器、智能驾驶计算平台、电子和电气架构、软件定义的汽车和汽车仪表芯片。会议期间,ZF VMC软件负责人方高明发表了题为“ZF汽车底盘集成控制”的主题演讲。以下是发言实录,供大家参考。

图为:ZF VMC软件公司负责人方高明。
语音记录:
各位下午好。接下来,我想介绍一下ZF车辆的集成底盘控制。
围绕下一代移动出行计划和零度智控的战略目标,ZF定义了四个主要关注的技术领域:自动驾驶、车辆运动控制、集成安全系统和电动汽车。今天我们要介绍的是车辆运动控制VMC。
下面将从四个方面带你了解ZF·VMC。
作为传统旧底盘零部件供应商,ZF在底盘相关系统专业领域有着广泛而深厚的技术积累。同时在底盘系统相关产品上也有全面的覆盖,如前轮转向系统、后轮转向系统(AKC)、制动系统(如IBC一箱)、电驱动和悬挂系统(如半主动减振器CDC、主动减振器S-Motion、主动稳定器ERC等)).ZF在底盘专业及相关产品方面的深厚技术积累为VMC提供了一大优势。
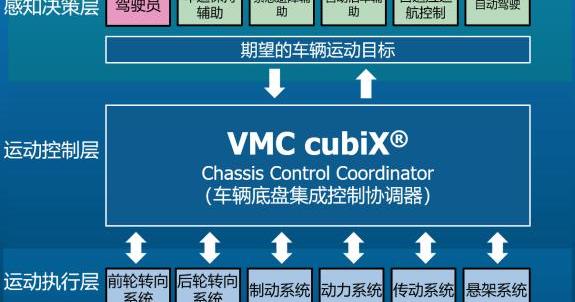
ZF·VMC拥有自己的软件产品cubiX。CubiX作为车辆底盘集成控制的协调者,在移动出行方案中起着承上启下的作用。对于整车系统来说,最顶层就是所谓的感知决策层。通过对传感器信息的处理和相关控制算法的决策规划,计算出期望的车辆运动目标。这里的感性决策者可以指辅助驾驶系统或自动驾驶系统控制器,当然广义上也可以指驾驶员对车辆的人为操纵。最底层是车辆底盘执行机构,如转向、制动、行驶和悬挂。上层感知决策计算出的目标或者驾驶员期望的目标,最终都要由底盘的执行器来执行。VMC是车辆运动控制的抽象层,抽象在感知决策层和执行层之间。VMC的软件CubiX作为车辆运动控制的中央协调器,将接收到的上层控制目标进行分解,通过内部的车辆运动控制算法,分解出各个底盘执行器的控制指令,如目标后轮角度、目标制动、驱动力等。,然后综合利用各个执行器实现期望的车辆运动目标。
CubiX作为底盘控制的中央协调器有一些特点。
首先,它既适用于手动驾驶(Cubix PD),也适用于辅助驾驶和自动驾驶(Cubix AD)。对于辅助/自动驾驶,cubiX可以从车辆动力学等方面综合考虑车辆执行目标轨迹的能力,并将这种能力以轨迹约束的形式反馈给上层控制器,从而保证决策层规划的路径是可执行的,实现类似于规划和执行的闭环。
此外,cubiX作为承上启下的纽带,可以实现“即插即用”(plug & Play接口)具有灵活性和可重用性,并将上层控制器与下层执行器解耦。其次,cubiX仅仅作为一个软件,可以灵活地集成并运行在具有相应能力的控制器硬件上。其模块化的软件设计使其在功能上具有可扩展性,并且可以扩展或开发更多具有附加值的新功能。
在性能驾驶方面,cubiX PD依托ZF在车辆运动控制和底盘执行器方面的专业能力和技术储备,可以在手动驾驶过程中提升车辆驾驶性能,包括车辆操控性和行驶稳定性的全面提升,同时也可以满足客户对定制化驾驶特性的需求。
在…方面iliary/自动驾驶,cubiX AD从车辆动力学等方面综合考虑车辆当前的轨迹执行能力,并反馈相应的轨迹约束给上层控制器;上位控制器只需要从车辆运动学或几何关系的角度考虑目标轨迹的规划;目标轨迹的执行完全由cubiX负责。这样,上层控制器可以专注于自身感知决策算法的设计和优化,而涉及车辆动力学和轨迹执行的考虑的底盘控制则委托给更专业的cubiX,也就是所谓的“专业的人做专业的事”。

接下来,我将向您介绍VMC的控制功能。
根据车辆的动态状态,我们将车辆的行驶工况分为正常行驶区、动态控制区和更接近动态极限的稳定性控制区。cubiX函数的控制目标更多的集中在驾驶中比较常见的正常驾驶区和动态控制区。
CubiX功能通过综合利用整车上可用的执行器,如驱动/四驱、前轮转向、后轮转向、制动、悬架等系统,达到预期的车辆运动目标和驾驶性能提升。
例如,cubiX PD的可变驾驶特性功能用于提高车辆在车辆行驶条件的正常驾驶和动态控制区域的响应性能,并提供更舒适或更有利于驾驶员的车辆响应。该功能可以综合利用各种执行器来提高车辆的性能,包括四驱、后转向、制动、主动稳定杆、电子减震器等。
再比如cubiX PD的预稳定控制功能,用于在车辆的动态操控和稳定控制区域为车辆提供更好的稳定性。该功能将在传统的ESC稳定控制干预之前,综合利用四驱、后转向、制动、主动稳定杆、电子减震器等可用执行器,提高驾驶稳定性。
再比如cubiX AD的轨迹执行功能,轨迹执行功能的扩展应用——四轮转向泊车,将接收到的目标轨迹进行分解,得到目标的方向盘角度、后轮角度、制动力、驱动力,从而跟踪轨迹。
接下来,结合车辆应用场景,进一步阐述cubiX的功能和控制目标。
根据从低速到高速的行驶工况,VMC主要着眼于减小车辆的转弯半径,实现对低速行驶工况更加敏捷灵活的驾驶响应。手动驾驶时,cubiX PD的低速柔性驾驶功能通过控制后轮角度,使后轮角度相对于前轮角度反向偏转,从而减小转弯半径,提高驾驶灵活性。在自动驾驶的情况下,将后轮角度引入到目标轨迹的规划中,cubiX AD的四轮转向自动泊车功能在执行轨迹时也将后轮角度考虑在内,这样在自动泊车时可以实现更小的转弯半径,降低对车位大小的要求,减少车位的调整次数,从而提高泊车成功率。
对于中速或中高速行驶条件,VMC主要侧重于更舒适、更灵活的车辆驾驶特性,使车辆在正常驾驶和动态控制领域的反应更加敏捷、灵活。此时,cubiX PD的可变驾驶特性功能可以实现车辆驾驶特性的调节,实现转向不足、转向过度或空挡转向的驾驶特性。
对于高速行驶来说,此时为车辆提供更稳定的车辆响应更为重要,更稳定的车辆响应也能为驾驶员提供更多的信心。此时cubiX PD的预稳定控制功能,结合可变驾驶特性功能,可以提高车辆的稳定性。预稳定控制功能旨在弥补ESC稳定控制干预前车辆转向不足或转向过度的趋势,尽量使用制动以外的其他执行器,可以减少ESC的干预或推迟ESC的干预,减少行驶过程中制动的干预,提高NVH性能。
此外,cubiX PD的越野控制功能可以补偿左右轮制动力不对称导致的车辆偏航,当……hicle通过控制前轮转向和后轮转向在越野时加速和减速。该功能可以配合传统的ABS功能。车辆的横摆控制交给cubiX PD的开放道路控制功能,车轮打滑控制(防抱死制动)交给ABS。这样,如果ABS采用更激进的控制参数,两者结合可以全面减少驾驶员在校正车辆横摆时的转向干预,减少车辆的制动距离。
对于Cubix AD来说,中高速下的功能主要是执行目标轨迹。通过整合Cubix AD和Cubix PD,在轨迹执行过程中可以同时进行Cubix PD的相关功能,可以使目标轨迹的跟踪更加准确和舒适。
最后,我将介绍VMC适应未来电子电气架构的产品方案。
首先,VMC的软件适用于传统的基于信号的软件架构。此时集成了Cubix的ECU接收或发送来自总线的相关信号,通过经典AUTOSAR的RTE实现相关信号与Cubix的交互。这种基于信号的软件方案还可以将决策层和执行层解耦。
同时,VMC的软件也将适应未来电子电气架构的发展趋势,适用于面向服务(SOA)的电子电气架构。此时cubiX将基于Aaptive AUTOSAR开发,可以运行在配备ZF中间件的高性能计算机平台(如ProAI)或其他软硬件平台上。此时Cubix被定义为一个服务,可以通过API进行调度。在软件定义汽车的大趋势下,ZF VMC也将为客户提供更加灵活、开放的软件、系统解决方案和更多附加值。
我的介绍就到此为止。谢谢你。8月26日,由Gaspar主办的“2021行业首届智能汽车域控制器创新峰会”在上海汽车城瑞丽酒店举行。为期两天的会议将重点讨论智能汽车、智能驾驶域控制器、智能驾驶舱域控制器、底盘和车身域控制器、智能驾驶计算平台、电子和电气架构、软件定义的汽车和汽车仪表芯片。会议期间,ZF VMC软件负责人方高明发表了题为“ZF汽车底盘集成控制”的主题演讲。以下是发言实录,供大家参考。
图为:ZF VMC软件公司负责人方高明。
语音记录:
各位下午好。接下来,我想介绍一下ZF车辆的集成底盘控制。
围绕下一代移动出行计划和零度智控的战略目标,ZF定义了四个主要关注的技术领域:自动驾驶、车辆运动控制、集成安全系统和电动汽车。今天我们要介绍的是车辆运动控制VMC。
下面将从四个方面带你了解ZF·VMC。
作为传统旧底盘零部件供应商,ZF在底盘相关系统专业领域有着广泛而深厚的技术积累。同时在底盘系统相关产品上也有全面的覆盖,如前轮转向系统、后轮转向系统(AKC)、制动系统(如IBC一箱)、电驱动和悬挂系统(如半主动减振器CDC、主动减振器S-Motion、主动稳定器ERC等)).ZF在底盘专业及相关产品方面的深厚技术积累为VMC提供了一大优势。
ZF·VMC拥有自己的软件产品cubiX。CubiX作为车辆底盘集成控制的协调者,在移动出行方案中起着承上启下的作用。对于整车系统来说,最顶层就是所谓的感知决策层。通过对传感器信息的处理和相关控制算法的决策规划,计算出期望的车辆运动目标。这里的感性决策者可以指辅助驾驶系统或自动驾驶系统控制器,当然广义上也可以指驾驶员对车辆的人为操纵。最底层是车辆底盘执行机构,如转向、制动、行驶和悬挂。上层感知决策计算出的目标或者驾驶员期望的目标,最终都要由底盘的执行器来执行。VMC是抽象的l……车辆运动控制的er,抽象在感知决策层和执行层之间。VMC的软件CubiX作为车辆运动控制的中央协调器,将接收到的上层控制目标进行分解,通过内部的车辆运动控制算法,分解出各个底盘执行器的控制指令,如目标后轮角度、目标制动、驱动力等。,然后综合利用各个执行器实现期望的车辆运动目标。
CubiX作为底盘控制的中央协调器有一些特点。
首先,它既适用于手动驾驶(Cubix PD),也适用于辅助驾驶和自动驾驶(Cubix AD)。对于辅助/自动驾驶,cubiX可以从车辆动力学等方面综合考虑车辆执行目标轨迹的能力,并将这种能力以轨迹约束的形式反馈给上层控制器,从而保证决策层规划的路径是可执行的,实现类似于规划和执行的闭环。
此外,cubiX作为承上启下的纽带,可以实现“即插即用”(plug & Play接口)具有灵活性和可重用性,并将上层控制器与下层执行器解耦。其次,cubiX仅仅作为一个软件,可以灵活地集成并运行在具有相应能力的控制器硬件上。其模块化的软件设计使其在功能上具有可扩展性,并且可以扩展或开发更多具有附加值的新功能。
在性能驾驶方面,cubiX PD依托ZF在车辆运动控制和底盘执行器方面的专业能力和技术储备,可以在手动驾驶过程中提升车辆驾驶性能,包括车辆操控性和行驶稳定性的全面提升,同时也可以满足客户对定制化驾驶特性的需求。
在辅助/自动驾驶方面,cubiX AD从车辆动力学等方面综合考虑车辆当前的轨迹执行能力,并将相应的轨迹约束反馈给上层控制器;上位控制器只需要从车辆运动学或几何关系的角度考虑目标轨迹的规划;目标轨迹的执行完全由cubiX负责。这样,上层控制器可以专注于自身感知决策算法的设计和优化,而涉及车辆动力学和轨迹执行的考虑的底盘控制则委托给更专业的cubiX,也就是所谓的“专业的人做专业的事”。
接下来,我将向您介绍VMC的控制功能。
根据车辆的动态状态,我们将车辆的行驶工况分为正常行驶区、动态控制区和更接近动态极限的稳定性控制区。cubiX函数的控制目标更多的集中在驾驶中比较常见的正常驾驶区和动态控制区。
CubiX功能通过综合利用整车上可用的执行器,如驱动/四驱、前轮转向、后轮转向、制动、悬架等系统,达到预期的车辆运动目标和驾驶性能提升。
例如,cubiX PD的可变驾驶特性功能用于提高车辆在车辆行驶条件的正常驾驶和动态控制区域的响应性能,并提供更舒适或更有利于驾驶员的车辆响应。该功能可以综合利用各种执行器来提高车辆的性能,包括四驱、后转向、制动、主动稳定杆、电子减震器等。
再比如cubiX PD的预稳定控制功能,用于在车辆的动态操控和稳定控制区域为车辆提供更好的稳定性。该功能将在传统的ESC稳定控制干预之前,综合利用四驱、后转向、制动、主动稳定杆、电子减震器等可用执行器,提高驾驶稳定性。
再比如cubiX AD的轨迹执行功能,轨迹执行功能的扩展应用——四轮转向泊车,将接收到的目标轨迹进行分解,得到目标的方向盘角度、后轮角度、制动力、驱动力,从而跟踪轨迹。
接下来,结合车辆应用场景,进一步阐述cubiX的功能和控制目标。
根据从低速到高速的行驶工况,VMC主要着眼于减小车辆的转弯半径,实现对低速行驶工况更加敏捷灵活的驾驶响应。手动驾驶时,cubiX PD的低速柔性驾驶功能通过控制后轮角度,使后轮角度相对于前轮角度反向偏转,从而减小转弯半径,提高驾驶灵活性。在自动驾驶的情况下,将后轮角度引入到目标轨迹的规划中,cubiX AD的四轮转向自动泊车功能在执行轨迹时也将后轮角度考虑在内,这样在自动泊车时可以实现更小的转弯半径,降低对车位大小的要求,减少车位的调整次数,从而提高泊车成功率。
对于中速或中高速行驶条件,VMC主要侧重于更舒适、更灵活的车辆驾驶特性,使车辆在正常驾驶和动态控制领域的反应更加敏捷、灵活。此时,cubiX PD的可变驾驶特性功能可以实现车辆驾驶特性的调节,实现转向不足、转向过度或空挡转向的驾驶特性。
对于高速行驶来说,此时为车辆提供更稳定的车辆响应更为重要,更稳定的车辆响应也能为驾驶员提供更多的信心。此时cubiX PD的预稳定控制功能,结合可变驾驶特性功能,可以提高车辆的稳定性。预稳定控制功能旨在弥补ESC稳定控制干预前车辆转向不足或转向过度的趋势,尽量使用制动以外的其他执行器,可以减少ESC的干预或推迟ESC的干预,减少行驶过程中制动的干预,提高NVH性能。
此外,cubiX PD的越野控制功能可以补偿左右轮制动力不对称导致的车辆偏航,当……hicle通过控制前轮转向和后轮转向在越野时加速和减速。该功能可以配合传统的ABS功能。车辆的横摆控制交给cubiX PD的开放道路控制功能,车轮打滑控制(防抱死制动)交给ABS。这样,如果ABS采用更激进的控制参数,两者结合可以全面减少驾驶员在校正车辆横摆时的转向干预,减少车辆的制动距离。
对于Cubix AD来说,中高速下的功能主要是执行目标轨迹。通过整合Cubix AD和Cubix PD,在轨迹执行过程中可以同时进行Cubix PD的相关功能,可以使目标轨迹的跟踪更加准确和舒适。
最后,我将介绍VMC适应未来电子电气架构的产品方案。
首先,VMC的软件适用于传统的基于信号的软件架构。此时集成了Cubix的ECU接收或发送来自总线的相关信号,通过经典AUTOSAR的RTE实现相关信号与Cubix的交互。这种基于信号的软件方案还可以将决策层和执行层解耦。
同时,VMC的软件也将适应未来电子电气架构的发展趋势,适用于面向服务(SOA)的电子电气架构。此时cubiX将基于Aaptive AUTOSAR开发,可以运行在配备ZF中间件的高性能计算机平台(如ProAI)或其他软硬件平台上。此时Cubix被定义为一个服务,可以通过API进行调度。在软件定义汽车的大趋势下,ZF VMC也将为客户提供更加灵活、开放的软件、系统解决方案和更多附加值。
我的介绍就到此为止。谢谢你。
标签:
盖世汽车讯据外媒报道,美国电动汽车制造商特斯拉正在与至少三家印度供应商就采购关键零部件问题进行谈判,这是特斯拉进军印度市场计划的一部分。
1900/1/1 0:00:008月30日,理想汽车公布了截至2021年6月30日的2021年第二季度财报。
1900/1/1 0:00:00盖世汽车讯据外媒报道,上周,全球半导体芯片短缺继续冲击着汽车行业,根据AutoForecastSolutions(以下简称为AFS)的最新数据,截至8月29日,全球汽车累计减产量达688
1900/1/1 0:00:008月29日,“三年而立”的欧拉,以一场前所未有的“闺蜜局”,在成都车展上玩出了新花样,用更走心的展台布置、更懂女性的闺蜜之车、更宏伟的她商业生态,
1900/1/1 0:00:00日前我们获悉,北京奔驰汽车有限公司根据《缺陷汽车产品召回管理条例》和《缺陷汽车产品召回管理条例实施办法》的要求,向国家市场监督管理总局备案了召回计划。
1900/1/1 0:00:00特斯拉竞争对手之一的Rivian近日宣布,已秘密向美国证券交易协会(SEC)提交招股申请,并计划于今年11月在美国纽约交易所进行公开募股(IPO)。
1900/1/1 0:00:00