都说世界上最难的两件事,一是把自己的思想装进别人的脑袋,二是把别人的钱装进自己的口袋。这两件事,毫米波雷达都做到了:让坚持纯视觉方案的特斯拉花钱把它重新“请”上了车。

特斯拉谍照有望搭载4D毫米波雷达
想必很多朋友已经知道这个了。特斯拉即将推出的HW 4.0智能驾驶计划预计将包括4D毫米波雷达。消息一出,各大相关公司股票暴涨。让股市波动,让马斯克“真香”。4D毫米波雷达的能力如何?
毫米波雷达
在回答这个问题之前,我们得先了解一下车载毫米波雷达。
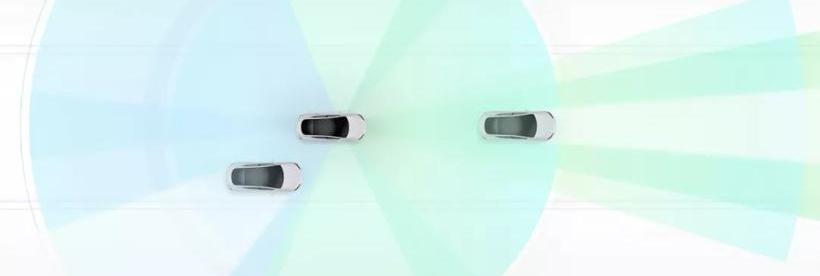
车载毫米波雷达工作模型图
如果用一句话来形容车载毫米波雷达,我只能说它开启了智能辅助驾驶的时代——1999年,奔驰S级车型首次应用了基于毫米波雷达的自适应巡航功能,这套系统被命名为Distronic(距离控制系统)。

配有Distronic系统的奔驰S级
即使我们看到车企更愿意用激光雷达来宣传自己的智能辅助驾驶能力,其实毫米波雷达的特性是激光雷达无法替代的。
毫米波雷达是工作在毫米波频段的雷达。毫米波的波长一般为1-10mm,频率为30-300GHz。发射和接收电磁波信号后,利用多普勒效应计算目标的各种参数(如测距、测速、测角)。
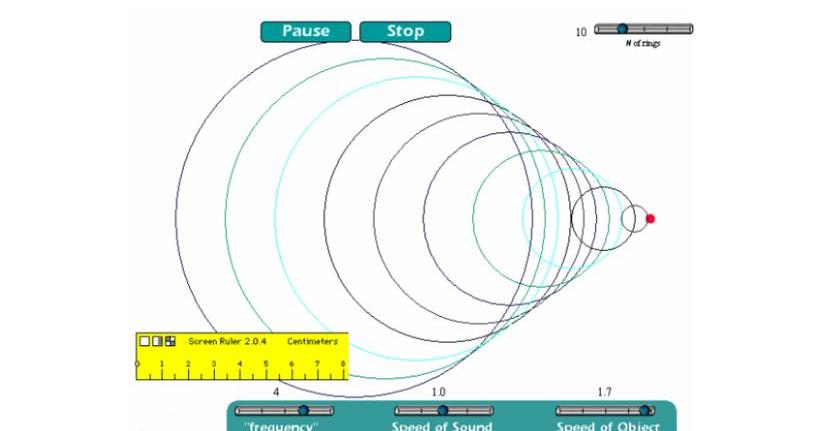
多普勒效应
不同长度的波在大气中传播时会受到不同程度的阻碍和吸收,而毫米波的波长介于微波和红外波之间,因此兼具两者的优点。与微波相比,毫米波方向性好,分辨率高,抗干扰能力强,探测性能更好。
与红外波相比,毫米波在大气中传播时衰减较小,能更好地穿透烟尘,受天气影响较小。这些特点决定了毫米波雷达具有全天候工作能力(暴雨除外)。
因为雷达涉及军用,国家对民用开放的频段是管制的。目前国际上主流的车载毫米波雷达频率有24GHz(也算是毫米波频率)、77GHz和79GHz,少数国家如日本开放60GHz频率。
我国车载毫米波雷达开放的频率是24GHz和77GHz,所以目前我国车载毫米波雷达分为24GHz和77GHz。
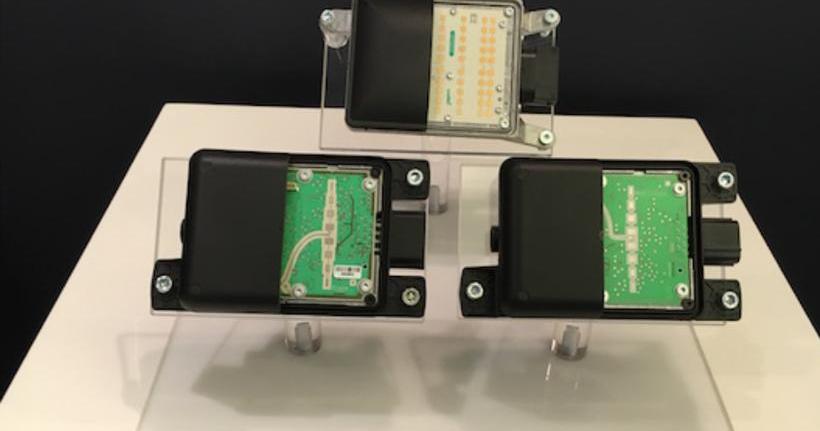
海拉24GHz毫米波雷达
就像不同分贝的声音可以到达不同的距离一样,不同频率的毫米波雷达可以探测到不同的距离。24GHz的探测距离通常为30-120 m,77 GHz的探测距离通常为200m以上。
看到这里可能有物理比较好的朋友想质疑我:根据波传播理论,频率越高,分辨率越高,穿透能力越强,但是传输损耗越大,传输距离越短;相对来说,频率越低,波长越长,衍射能力越强,传输距离越远。
那为什么我说77GHz毫米波雷达的探测距离比24GHz毫米波雷达更远呢?这与毫米波雷达的结构和技术有关。
毫米波雷达的硬件约占50%,主要由射频前端(MMIC)、数字信号处理器、天线和控制电路组成,另外50%由软件算法组成。
在建造毫米波雷达的过程中
雷达天线的大小与波长成正比。24GHz雷达的波长更长,因此天线更大,而77GHz雷达天线更小(约为24GHz雷达天线尺寸的1/3),在相同体积内可以布置更多的天线单元。
一般24 GHz毫米波雷达的天线只能发射一个信号,接收两个信号,而77GHz毫米波雷达的天线可以发射四个信号,接收四个信号。整个天线阵的增益是77GHz毫米波雷达探测距离更远的原因之一。
此外,24GHz的毫米波衍射能力更强,就像游戏“抽纸牌”一样,到最后已经出现了严重的信息偏差,所以近距离的探测信息更可靠。
两者在分辨率上也有区别:77GHz毫米波雷达的最小分辨距离为3.75cm,而24GHz毫米波雷达的最小分辨距离为60cm。

国产77GHz毫米波雷达
这意味着当两个目标物体之间的距离为60cm时,只有77GHz毫米波雷达能够成功分辨,24GHz毫米波雷达将被视为只有一个目标物体。
虽然看起来频率不一样,但实际上它们的性能差别很大,所以使用场景也不一样。目前业内常见的毫米波雷达搭配方式是一个前进方向+四个横向(左前、左后、右前、右后),排列如下:

目前主流的毫米波雷达具有测角、测距和测速功能,即测量目标物体的方位、距离和速度。我们称之为3D毫米波雷达。但是它有一个巨大的缺陷,就是不能识别静态物体。
由于缺乏高度信息,对于3D毫米波雷达来说,地面减速带或者其他不产生速度信息的静态障碍物,和上面的立交桥没什么区别。
如果检测到立交桥马上影响刹车,那就太离谱了。所以3D毫米波雷达的算法直接忽略了这些静止物体。即使前面有陨石,3D毫米波雷达也不会触发刹车。
这可能就是2020年一辆特斯拉直接撞上前面静止不动的车的原因。毫米波雷达选择了闭眼,特斯拉的视觉方案也没有现在好。

特斯拉在辅助驾驶模式下即将撞上一辆卡车
这一缺陷使得毫米波雷达在要求越来越高的智能驾驶市场陷入僵局,直到2020年第一台4D毫米波雷达诞生。
4D毫米波雷达与激光雷达
4D毫米波雷达在三维毫米波雷达的基础上增加了高度信息,这直接影响到4D毫米波雷达的成像。
当波撞击到物体表面时,反射波会携带方位、距离等信息,经过坐标变换后以点云数据的形式出现。两台毫米波雷达通过软件算法转换的图像如下:
比如一个体宽80 cm,高1.7m的人在快速奔跑,3D毫米波雷达会识别出一条由点组成的水平80 cm虚线在一定距离以一定速度向某个方向运动,而4D毫米波雷达会识别出一个体宽80 cm,高1.7m的人形在一定距离以一定速度向某个方向运动。
有一根2米长、离地面3米的限高杆……前面找到了,下面还有一条同样长度的减速带。3D毫米波雷达会将其识别为两条几乎重叠的2m长的虚线,而4D毫米波雷达会将其识别为两条2m长的虚线之间的无障碍距离为3m。
4D毫米波雷达不再有不能识别静止物体的缺陷。此外,价格仅为激光雷达的10%-20%,自带毫米波雷达具有探测距离远、抗干扰能力强、雨雾无阻等特点。4D毫米波雷达被认为是激光雷达的强劲对手。
用4D毫米波雷达代替激光雷达可行吗?目前,答案是否定的。
4D毫米波雷达和激光雷达的本质是主动探测透波信号。4D毫米波雷达的波长是3.9毫米,而激光雷达的波长通常是905或1550纳米。由于波的传播特性,激光雷达面对雨、雾、沙尘暴等天气几乎束手无策,而毫米波雷达则可以发挥作用。
虽然两者都可以成像,但是激光雷达有碾压4D毫米波雷达的优势,也就是分辨率。市面上的4D毫米波雷达每秒可生成约10万个点云,而128线激光雷达每秒可生成140万个点云。
0
140万分画出来的人像,自然比10万分画出来的要准确很多。不仅是人像轮廓的清晰度不同,更直接的影响是角度分辨率的差距。
激光雷达的角分辨率为0.1°,而4D毫米波雷达的角分辨率为1°。也就是说,当两个目标物体的角度差为1°时,只有激光雷达才能分辨出来。
归根结底,在成像方面,激光雷达的分辨率是4D毫米波雷达无法比拟的。目前,4D毫米波雷达更适合补充视觉算法,并在雨雪天气中帮助相机。
这样,4D毫米波雷达比激光雷达更适合特斯拉。
除了成本,激光雷达的成像优势对于特斯拉的视觉方案来说是重复的。相机和激光雷达共同的缺点是受限于低能见度的天气,这个问题对于特斯拉来说只能靠毫米波雷达来解决。
毫米波雷达历史
回到开头的问题,可能很多朋友会选择中国。毕竟我们现在的智能驾驶市场是如火如荼的,但实际答案是德国人。
1904年,德国人秦丝·赫尔斯·迈耶在前人电磁理论和电磁波实验的基础上,利用无线电波反弹探测装置,研制出了最初的船舶防撞雷达,这是世界上第一部雷达。
1935年,英国人罗伯特·沃森·瓦特成功研制出一种实用的雷达系统,被英国空军大规模部署。通过提前探测德国飞机,这一系统帮助英国抵抗了纳粹德国的袭击,赢得了“英国空战”。
1
罗伯特·沃森·瓦特
德国人发明的雷达被英国人用来打败德国?据说德国人很不满意,回去好好学习。后来汽车工业的繁荣和1986年欧洲制定的“欧洲高效安全交通系统计划”催化了车载雷达的蓬勃发展。
2012年,德国半导体巨头英飞凌推出了24GHz单片雷达解决方案,降低了毫米波雷达的技术门槛和制造成本,促进了其在各个领域的应用。
国内对毫米波雷达的研究时间不长。2013年24GHz毫米波雷达产品进入中国,同时国外封锁了77GHz毫米波雷达的国内技术。
2014-2016年,国内毫米波初创企业纷纷成立,最早研究毫米波雷达的是SAIC旗下的华宇汽车。2016-2017年,国产24GHz毫米波雷达开始量产,77GHz毫米波雷达开始出现样品。
虽然全球毫米波雷达市场仍由国外领先制造商如博世、中国、海拉等主导。,国内行业发展也处于蓬勃发展的状态,国产77GHz毫米波雷达已经出现,比如德赛……威、科技等国内领先企业已具备批量生产能力。
最后,我想一边倒的说说为什么国外有更好的智能辅助驾驶核心传感器技术,而国内却成为智能辅助驾驶的核心战场。
2018年,德国制造商大陆集团(Continental Group)调查了自动驾驶汽车的接受程度。中国高达89%的受访者支持自动驾驶技术,而德国和美国的这一比例分别为53%和50%。都说世界上最难的两件事,一是把自己的思想装进别人的脑袋,二是把别人的钱装进自己的口袋。这两件事,毫米波雷达都做到了:让坚持纯视觉方案的特斯拉花钱把它重新“请”上了车。
特斯拉谍照有望搭载4D毫米波雷达
想必很多朋友已经知道这个了。特斯拉即将推出的HW 4.0智能驾驶计划预计将包括4D毫米波雷达。消息一出,各大相关公司股票暴涨。让股市波动,让马斯克“真香”。4D毫米波雷达的能力如何?
毫米波雷达
在回答这个问题之前,我们得先了解一下车载毫米波雷达。
车载毫米波雷达工作模型图
如果用一句话来形容车载毫米波雷达,我只能说它开启了智能辅助驾驶的时代——1999年,奔驰S级车型首次应用了基于毫米波雷达的自适应巡航功能,这套系统被命名为Distronic(距离控制系统)。
配有Distronic系统的奔驰S级
即使我们看到车企更愿意用激光雷达来宣传自己的智能辅助驾驶能力,其实毫米波雷达的特性是激光雷达无法替代的。
毫米波雷达是工作在毫米波频段的雷达。毫米波的波长一般为1-10mm,频率为30-300GHz。发射和接收电磁波信号后,利用多普勒效应计算目标的各种参数(如测距、测速、测角)。
多普勒效应
不同长度的波在大气中传播时会受到不同程度的阻碍和吸收,而毫米波的波长介于微波和红外波之间,因此兼具两者的优点。与微波相比,毫米波方向性好,分辨率高,抗干扰能力强,探测性能更好。
与红外波相比,毫米波在大气中传播时衰减较小,能更好地穿透烟尘,受天气影响较小。这些特点决定了毫米波雷达具有全天候工作能力(暴雨除外)。
因为雷达涉及军用,国家对民用开放的频段是管制的。目前国际上主流的车载毫米波雷达频率有24GHz(也算是毫米波频率)、77GHz和79GHz,少数国家如日本开放60GHz频率。
我国车载毫米波雷达开放的频率是24GHz和77GHz,所以目前我国车载毫米波雷达分为24GHz和77GHz。
海拉24GHz毫米波雷达
就像不同分贝的声音可以到达不同的距离一样,不同频率的毫米波雷达可以探测到不同的距离。24GHz的探测距离通常为30-120 m,77 GHz的探测距离通常为200m以上。
看到这里可能有物理比较好的朋友想质疑我:根据波传播理论,频率越高,分辨率越高,穿透能力越强,但是传输损耗越大,传输距离越短;相对来说,频率越低,波长越长,衍射能力越强,传输距离越远。
那为什么我说77GHz毫米波雷达的探测距离比24GHz毫米波雷达更远呢?这与毫米波雷达的结构和技术有关。
毫米波雷达的硬件约占50%,主要由射频前端(MMIC)、数字信号处理器、天线和控制电路组成,另外50%由软件算法组成。
在建造毫米波雷达的过程中
雷达天线的大小与波长成正比。24GHz雷达的波长更长,因此天线更大,而77GHz雷达天线更小(约为24GHz雷达天线尺寸的1/3),在相同体积内可以布置更多的天线单元。
一般24 GHz毫米波雷达的天线只能发射一个信号,接收两个信号,而77GHz毫米波雷达的天线可以发射四个信号,接收四个信号。整个天线阵的增益是77GHz毫米波雷达探测距离更远的原因之一。
此外,24GHz的毫米波衍射能力更强,就像游戏“抽纸牌”一样,到最后已经出现了严重的信息偏差,所以近距离的探测信息更可靠。
两者在分辨率上也有区别:77GHz毫米波雷达的最小分辨距离为3.75cm,而24GHz毫米波雷达的最小分辨距离为60cm。
国产77GHz毫米波雷达
这意味着当两个目标物体之间的距离为60cm时,只有77GHz毫米波雷达能够成功分辨,24GHz毫米波雷达将被视为只有一个目标物体。
虽然看起来频率不一样,但实际上它们的性能差别很大,所以使用场景也不一样。目前业内常见的毫米波雷达搭配方式是一个前进方向+四个横向(左前、左后、右前、右后),排列如下:
目前主流的毫米波雷达具有测角、测距和测速功能,即测量目标物体的方位、距离和速度。我们称之为3D毫米波雷达。但是它有一个巨大的缺陷,就是不能识别静态物体。
由于缺乏高度信息,对于3D毫米波雷达来说,地面减速带或者其他不产生速度信息的静态障碍物,和上面的立交桥没什么区别。
如果检测到立交桥马上影响刹车,那就太离谱了。所以3D毫米波雷达的算法直接忽略了这些静止物体。即使前面有陨石,3D毫米波雷达也不会触发刹车。
这可能就是2020年一辆特斯拉直接撞上前面静止不动的车的原因。毫米波雷达选择了闭眼,特斯拉的视觉方案也没有现在好。
特斯拉在辅助驾驶模式下即将撞上一辆卡车
这一缺陷使得毫米波雷达在要求越来越高的智能驾驶市场陷入僵局,直到2020年第一台4D毫米波雷达诞生。
4D毫米波雷达与激光雷达
4D毫米波雷达在三维毫米波雷达的基础上增加了高度信息,这直接影响到4D毫米波雷达的成像。
当波撞击到物体表面时,反射波会携带方位、距离等信息,经过坐标变换后以点云数据的形式出现。两台毫米波雷达通过软件算法转换的图像如下:
比如一个体宽80 cm,高1.7m的人在快速奔跑,3D毫米波雷达会识别出一条由点组成的水平80 cm虚线在一定距离以一定速度向某个方向运动,而4D毫米波雷达会识别出一个体宽80 cm,高1.7m的人形在一定距离以一定速度向某个方向运动。
有一根2米长、离地面3米的限高杆……前面找到了,下面还有一条同样长度的减速带。3D毫米波雷达会将其识别为两条几乎重叠的2m长的虚线,而4D毫米波雷达会将其识别为两条2m长的虚线之间的无障碍距离为3m。
4D毫米波雷达不再有不能识别静止物体的缺陷。此外,价格仅为激光雷达的10%-20%,自带毫米波雷达具有探测距离远、抗干扰能力强、雨雾无阻等特点。4D毫米波雷达被认为是激光雷达的强劲对手。
用4D毫米波雷达代替激光雷达可行吗?目前,答案是否定的。
4D毫米波雷达和激光雷达的本质是主动探测透波信号。4D毫米波雷达的波长是3.9毫米,而激光雷达的波长通常是905或1550纳米。由于波的传播特性,激光雷达面对雨、雾、沙尘暴等天气几乎束手无策,而毫米波雷达则可以发挥作用。
虽然两者都可以成像,但是激光雷达有碾压4D毫米波雷达的优势,也就是分辨率。市面上的4D毫米波雷达每秒可生成约10万个点云,而128线激光雷达每秒可生成140万个点云。
0
140万分画出来的人像,自然比10万分画出来的要准确很多。不仅是人像轮廓的清晰度不同,更直接的影响是角度分辨率的差距。
激光雷达的角分辨率为0.1°,而4D毫米波雷达的角分辨率为1°。也就是说,当两个目标物体的角度差为1°时,只有激光雷达才能分辨出来。
归根结底,在成像方面,激光雷达的分辨率是4D毫米波雷达无法比拟的。目前,4D毫米波雷达更适合补充视觉算法,并在雨雪天气中帮助相机。
这样,4D毫米波雷达比激光雷达更适合特斯拉。
除了成本,激光雷达的成像优势对于特斯拉的视觉方案来说是重复的。相机和激光雷达共同的缺点是受限于低能见度的天气,这个问题对于特斯拉来说只能靠毫米波雷达来解决。
毫米波雷达历史
回到开头的问题,可能很多朋友会选择中国。毕竟我们现在的智能驾驶市场是如火如荼的,但实际答案是德国人。
1904年,德国人秦丝·赫尔斯·迈耶在前人电磁理论和电磁波实验的基础上,利用无线电波反弹探测装置,研制出了最初的船舶防撞雷达,这是世界上第一部雷达。
1935年,英国人罗伯特·沃森·瓦特成功研制出一种实用的雷达系统,被英国空军大规模部署。通过提前探测德国飞机,这一系统帮助英国抵抗了纳粹德国的袭击,赢得了“英国空战”。
1
罗伯特·沃森·瓦特
德国人发明的雷达被英国人用来打败德国?据说德国人很不满意,回去好好学习。后来汽车工业的繁荣和1986年欧洲制定的“欧洲高效安全交通系统计划”催化了车载雷达的蓬勃发展。
2012年,德国半导体巨头英飞凌推出了24GHz单片雷达解决方案,降低了毫米波雷达的技术门槛和制造成本,促进了其在各个领域的应用。
国内对毫米波雷达的研究时间不长。2013年,24GHz毫米波雷达产品进入中国,同时国外封锁了77GHz毫米波雷达的国内技术。
2014-2016年,国内毫米波初创企业纷纷成立,最早研究毫米波雷达的是SAIC旗下的华宇汽车。2016-2017年,国产24GHz毫米波雷达开始量产,77GHz毫米波雷达开始出现样品。
虽然全球毫米波雷达市场仍由国外领先制造商如博世、中国、海拉等主导。,国内行业发展也处于蓬勃发展的状态,国产77GHz毫米波雷达已经出现,比如德赛……威、科技等国内领先企业已具备批量生产能力。
最后,我想一边倒的说说为什么国外有更好的智能辅助驾驶核心传感器技术,而国内却成为智能辅助驾驶的核心战场。
2018年,德国制造商大陆集团(Continental Group)调查了自动驾驶汽车的接受程度。中国高达89%的受访者支持自动驾驶技术,而德国和美国的这一比例分别为53%和50%。英国德勤咨询公司也进行了一项调查。截至2019年,中国消费者对自动驾驶汽车感到“危险”的比例为25%,在亚洲六个受访国家和地区中最低。
2022年,北京日报进行了一项关于中国人对自动驾驶接受程度的调查。结果显示,超过80%的中国人接受自动驾驶,远高于其他国家。
2
说这些并不是让大家忽视当前智能辅助驾驶技术的不成熟。相反,我们需要更现实地接受现有智能辅助驾驶技术的局限性。但这些数据表明,我们对科技有着更加包容和积极的态度,即使起步晚了一点。英国德勤咨询公司也进行了一项调查。截至2019年,中国消费者对自动驾驶汽车感到“危险”的比例为25%,在亚洲六个受访国家和地区中最低。
2022年,北京日报进行了一项关于中国人对自动驾驶接受程度的调查。结果显示,超过80%的中国人接受自动驾驶,远高于其他国家。
2
说这些并不是让大家忽视当前智能辅助驾驶技术的不成熟。相反,我们需要更现实地接受现有智能辅助驾驶技术的局限性。但这些数据表明,我们对科技有着更加包容和积极的态度,即使起步晚了一点。
北美时间3月1日(北京时间3月2日),特斯拉投资者日在得州工厂正式举行,时长为3个小时左右。
1900/1/1 0:00:00特斯拉墨西哥建厂计划获批2月28日,墨西哥总统安德烈斯曼努埃尔洛佩斯奥夫拉多尔宣布,特斯拉将在墨西哥北部建立一个新的装配厂,但没有透露该工厂将生产的车型。
1900/1/1 0:00:001比亚迪F品牌首款车型谍照曝光年内发布对标奔驰G级比亚迪F品牌(专业个性化全新品牌)首款车型谍照曝光。
1900/1/1 0:00:00丰田1月全球产量为689万辆2月27日,丰田汽车公布1月份全球产量为689090辆,同比增长88,系三个月以来的首次增长。
1900/1/1 0:00:00盖世汽车讯据外媒报道,汽车制造商Stellantis在2月27日表示,该公司已经投资1
1900/1/1 0:00:00当马斯克在特斯拉德国工厂畅谈“秘密宏图第三篇章”时,中国造车新势力理想汽车的创始人李想,也发表了对造车经验的总结、趋势判断和投入决心。
1900/1/1 0:00:00