我们之前报道过很多汽车驾驶模拟软件,比如Carla、Prescan、carsim、Panosim。。。它们都有一个共同的特点,那就是需要手动建模。“这种情况”太慢了,通常需要几周的时间才能建造几个城市街区。最近,一家名为Parallel Domain的初创公司声称,其计算程序可以在不到一分钟的时间内生成城市街区。

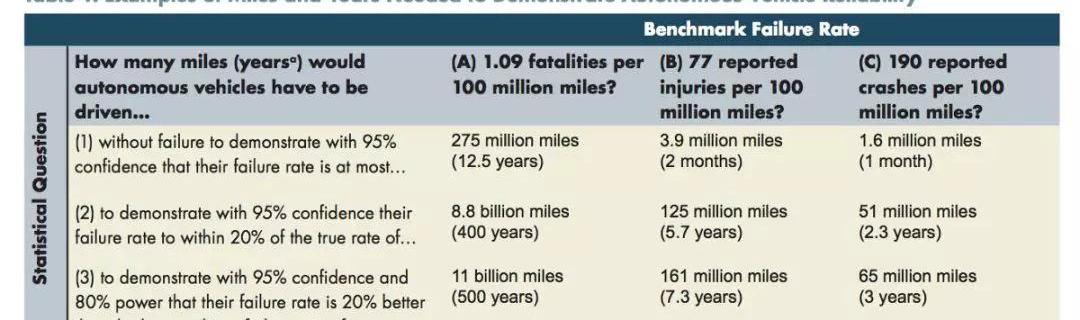
Parallel Domain是一家用于自动车辆模拟的3D环境生成软件供应商。其创始人是凯文·麦克纳马拉,他曾是苹果和皮克斯的员工。在苹果工作期间,麦克纳马拉参与了一个自动驾驶项目,在那里他探索了虚拟环境的自动内容生成。他当时的想法是利用这项技术来训练、测试、验证和开发自动驾驶系统的人工智能。后来,他创立了Parallel Domain。麦克纳马拉说:“我们所做的是利用计算机图形学来加速安全自动驾驶汽车的发展。”。“我们的想法是,在模拟中,你可以安全地犯错误,然后从中吸取教训。在虚拟世界中,你不会在模拟中伤害任何人。”Parallel Domain平台使用真实世界的地图数据、程序增长算法和生成模型,可以教汽车如何驾驶,并确保汽车软件正在学习。虚拟世界的所有元素都是可调节和可编程的,比如车道数量、地形类型、山脉位置、道路曲率等等。如果我们需要在模拟器中行驶数十亿英里,我们如何构建这些英里?当前的机器学习算法必须经过大量数据集的训练和测试。然而,真实世界的测试和数据收集需要真实的车辆、真实的驾驶员和实时的交通场景。根据兰德公司的说法,如果你想证明自动驾驶汽车的安全性,你需要安全行驶110亿英里。在现实世界中行驶这些英里是一个棘手的问题。所以很多人想到使用模拟驾驶数据,但用现有的人工方法建造几个高保真的城市街区需要数周甚至数月的时间,而且通常需要大量重复的体力劳动。
Parallel Domain开创性的内容生成技术提供了一个可配置、详细和可扩展的模拟环境。该软件将自动生成自动驾驶汽车所需的虚拟里程和虚拟场景,以便自动驾驶汽车在到达现实世界之前进行学习。自动驾驶汽车公司正在使用该软件来消除大规模模拟中最困难的障碍:构建车辆可能遇到的各种复杂环境。

为什么虚拟世界是自动生成的?这些由Parallel Domain独特的方法自动生成的模拟世界有很多优点。有了这项技术,虚拟世界已经成为一个巨大的参数空间,工程师、几行代码甚至人工智能都可以随意调整:为可能的世界做好准备,而不仅仅是今天的世界:增加一条自行车道,铺开垃圾,让路边的树提前生长,或者让沥青路面开裂或完全开裂,然后重新铺上新沥青。环境中单个因素的影响分析:在完全可重复性和参数化的世界中,通过改变其中一个元素,如车道数量、自行车道宽度或道路油漆状况,来分析单个因素对整体的影响,从而产生同一精确场景的多次运行。对抗网络:可以利用参数空间生成给定的虚拟世界,利用生成对抗技术为自动驾驶汽车创造一个困难的环境,并利用汽车的具体弱点进行训练。随机场:世界是由一组参数生成的,利用随机场直接生成不同条件下的大量数据,帮助ML算法从虚拟世界转移到现实世界。单元测试:到目前为止,还不可能大规模地产生一个完整的单元测试连续体。例如,有一个三向交叉点,可以以任何角度输入,并且可以以1度、10度或0.1度的增量尝试所有交叉点。很快就会有数以百万计的组合形成一个连续的测试空间。模拟数据的优点有很多方面。模拟(合成数据)是真实驾驶(真实数据)的理想基础,它们构成了一个很好的组合。有时我们会问,“合成数据什么时候才能像re一样好……
-世界数据?“事实上,合成数据和真实数据是相辅相成的,并将它们结合在一起,打造出一辆更安全、更可靠的汽车。模拟数据在某些领域有很大的优势:真实驾驶有风险/模拟驾驶完全安全。真实驾驶很慢(一辆车一天只能行驶很多英里)/模拟驾驶可以很快,可能快几千倍。真实驾驶每英里的成本很高(汽车维修、汽油、驾驶员)/模拟驾驶只是成本的一小部分(一旦建立了模拟器和虚拟世界)。真实驾驶需要管理真实车辆/模拟需要计算机。真实驾驶通常很无聊,没有信息/模拟可以使汽车在具有挑战性的环境下学习更多的真实世界数据,这需要对结果数据集进行容易出错的注释。这是在训练ML算法/模拟,以便每次都提供完整的注释数据。

Parallel Domain已经筹集了250万美元的种子资金,将为自动驾驶汽车的虚拟测试提供技术支持。模拟团队可以使用Parallel Domain的软件快速构建一个新的虚拟世界,并处理其中的任何变量,从车道数量到沥青状况。NIO成为第一个客户。该仿真平台的潜在需求不仅限于自动驾驶汽车。任何使用计算机视觉和机器学习来提高决策自主性的机器都需要一个高保真的虚拟世界来测试和证明其安全性。Parallel Domain是一种可以自动生成环境的技术,可以快速生成城市街区模型,从而消除公司大规模模拟的障碍。我们之前报道过很多汽车驾驶模拟软件,比如Carla、Prescan、carsim、Panosim。。。它们都有一个共同的特点,那就是需要手动建模。“这种情况”太慢了,通常需要几周的时间才能建造几个城市街区。最近,一家名为Parallel Domain的初创公司声称,其计算程序可以在不到一分钟的时间内生成城市街区。
Parallel Domain是一家用于自动车辆模拟的3D环境生成软件供应商。其创始人是凯文·麦克纳马拉,他曾是苹果和皮克斯的员工。在苹果工作期间,麦克纳马拉参与了一个自动驾驶项目,在那里他探索了虚拟环境的自动内容生成。他当时的想法是利用这项技术来训练、测试、验证和开发自动驾驶系统的人工智能。后来,他创立了Parallel Domain。麦克纳马拉说:“我们所做的是利用计算机图形学来加速安全自动驾驶汽车的发展。”。“我们的想法是,在模拟中,你可以安全地犯错误,然后从中吸取教训。在虚拟世界中,你不会在模拟中伤害任何人。”Parallel Domain平台使用真实世界的地图数据、程序增长算法和生成模型,可以教汽车如何驾驶,并确保汽车软件正在学习。虚拟世界的所有元素都是可调节和可编程的,比如车道数量、地形类型、山脉位置、道路曲率等等。如果我们需要在模拟器中行驶数十亿英里,我们如何构建这些英里?当前的机器学习算法必须经过大量数据集的训练和测试。然而,真实世界的测试和数据收集需要真实的车辆、真实的驾驶员和实时的交通场景。根据兰德公司的说法,如果你想证明自动驾驶汽车的安全性,你需要安全行驶110亿英里。在现实世界中行驶这些英里是一个棘手的问题。所以很多人想到使用模拟驾驶数据,但用现有的人工方法建造几个高保真的城市街区需要数周甚至数月的时间,而且通常需要大量重复的体力劳动。
Parallel Domain开创性的内容生成技术提供了一个可配置、详细和可扩展的模拟环境。该软件将自动生成自动驾驶汽车所需的虚拟里程和虚拟场景,以便自动驾驶汽车在到达现实世界之前进行学习。自动驾驶汽车公司正在使用该软件来消除大规模模拟中最困难的障碍:构建车辆可能遇到的各种复杂环境。
为什么虚拟世界是自动生成的?这些由Parallel Domain独特的方法自动生成的模拟世界有很多优点。有了这项技术,虚拟世界变得……
巨大的参数空间,可以由工程师、几行代码甚至人工智能随意调整:为可能的世界做好准备,而不仅仅是今天的世界:增加一条自行车道,铺开垃圾,让路边的树提前生长,或者让沥青路面开裂或完全开裂,然后重新铺设新的沥青。环境中单个因素的影响分析:在完全可重复性和参数化的世界中,通过改变其中一个元素,如车道数量、自行车道宽度或道路油漆状况,来分析单个因素对整体的影响,从而产生同一精确场景的多次运行。对抗网络:可以利用参数空间生成给定的虚拟世界,利用生成对抗技术为自动驾驶汽车创造一个困难的环境,并利用汽车的具体弱点进行训练。随机场:世界是由一组参数生成的,利用随机场直接生成不同条件下的大量数据,帮助ML算法从虚拟世界转移到现实世界。单元测试:到目前为止,还不可能大规模地产生一个完整的单元测试连续体。例如,有一个三向交叉点,可以以任何角度输入,并且可以以1度、10度或0.1度的增量尝试所有交叉点。很快就会有数以百万计的组合形成一个连续的测试空间。模拟数据的优点有很多方面。模拟(合成数据)是真实驾驶(真实数据)的理想基础,它们构成了一个很好的组合。有时我们会问,“合成数据什么时候才能和真实世界的数据一样好?”事实上,合成数据和真实数据是相辅相成的,并将它们结合在一起,打造出一辆更安全、更可靠的汽车。模拟数据在某些领域具有很大优势:真实驾驶有风险/模拟驾驶完全安全。真正的驾驶很慢(一辆车一天只能行驶很多英里)/模拟驾驶可以很快,可能快几千倍。真实驾驶每英里的成本很高(汽车维护、汽油、驾驶员)/模拟驾驶只是成本的一小部分(一旦建立了模拟器和虚拟世界)。真实驾驶需要管理真实车辆/模拟需要计算机。真实驾驶通常很无聊,没有信息/模拟可以使汽车在具有挑战性的环境下学习更多的真实世界数据,这需要对结果数据集进行容易出错的注释。这是在训练ML算法/模拟,以便每次都提供完整的注释数据。
Parallel Domain已经筹集了250万美元的种子资金,将为自动驾驶汽车的虚拟测试提供技术支持。模拟团队可以使用Parallel Domain的软件快速构建一个新的虚拟世界,并处理其中的任何变量,从车道数量到沥青状况。NIO成为第一个客户。该仿真平台的潜在需求不仅限于自动驾驶汽车。任何使用计算机视觉和机器学习来提高决策自主性的机器都需要一个高保真的虚拟世界来测试和证明其安全性。Parallel Domain是一种可以自动生成环境的技术,可以快速生成城市街区模型,从而消除公司大规模模拟的障碍。
标签:
2018年4月21日,由精进电动科技股份有限公司创建十周年庆典暨“新能源汽车技术高端论坛”在京隆重举办。
1900/1/1 0:00:005月3日下午,由GNEV官方机构主办、第一电动网承办的“中国汽车新硅谷2018长三角未来汽车供应链创新论坛”在上海奥迪国际赛车场空中餐厅举行,
1900/1/1 0:00:00近日从欧拉汽车官方获悉,欧拉R1车型将于今年年底正式上市。新车定位于纯电动微型车,采用了可爱造型风格,续航里程将达到300公里。
1900/1/1 0:00:00近日京威股份002662SZ发布公告称,终止其此前拟发行股份购买江苏卡威汽车工业集团股份有限公司下称江苏卡威剩余65股权的议案。
1900/1/1 0:00:005月2日,宾利在克鲁工厂开工建造英国历史上最大规模的太阳能发电停车场,该停车场建成后,宾利汽车所拥有的太阳能电池板将超过三万块,发电量可满足相当于1750多户家庭的电力需求。
1900/1/1 0:00:00从广东省汕头市交通部门了解到,近年来,汕头市不断加大公共交通财政投入,市民乘车环境不断改善。
1900/1/1 0:00:00