盖世汽车讯人类可能是全自动汽车进入城市街道的最大障碍之一。机器人必须能够预测附近司机、骑自行车的人和行人的行为,以便在波士顿市中心安全驾驶车辆。然而,行为预测的问题很难解决。目前的人工智能解决方案要么过于简单(可能假设行人总是走直线),要么过于保守(为了避开行人,机器人只是把车停在公园里),要么只能预测一个智能体的下一步行动(道路通常同时承载许多用户。)
据国外媒体报道,麻省理工学院(MIT)的研究人员设计了一个看似简单的解决方案。通过将多智能体行为预测问题分解为更小的部分,并分别处理每个部分,计算机可以实时解决这一复杂的任务。
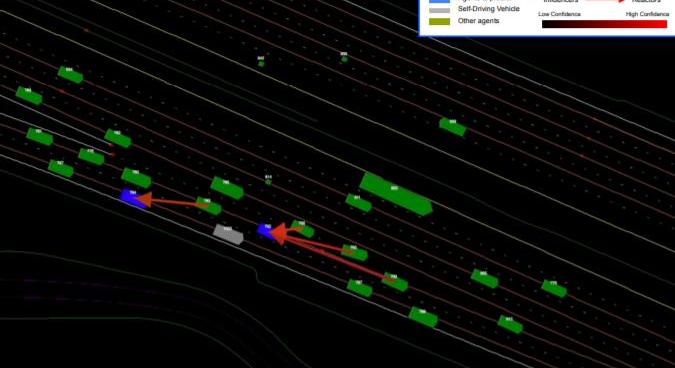
图片来源:arxiv
研究者的行为预测框架会首先猜测两个道路使用者之间的关系,哪个汽车、骑自行车的人或行人有通行权,哪个智能体会让路,并利用这些关系来预测多个智能体的未来轨迹。
该研究的联合主要作者Xin“Cyrus”Huang表示:“将我们的模型与该领域其他最先进的模型(如Waymo的模型)进行比较,我们的模型在这个具有挑战性的基准中取得了最佳性能。”
多个小模型
研究人员将这种机器学习方法称为M2I,它需要两个输入:汽车、骑自行车的人和行人在交通环境(如十字路口)中交互的过去轨迹,以及带有街道位置和车道配置的地图。
使用该信息,关系预测器可以推断两个代理中的哪一个首先具有通行权,并且将一个分类为通过者,将另一个分类为通过者。然后一个预测模型(边际预测器)猜测通过代理(独立运行)的轨迹。
第二种预测模型,称为条件预测器,会根据通过agent的动作来猜测yield agent的动作。为了让步行者和路人预测许多不同的轨迹,系统分别计算每个轨迹的概率,然后选择出现概率最高的6个联合结果。
M2I输出预测这些智能体将如何在接下来的8秒内穿过交叉口。在一个例子中,研究方法使车辆减速,以便行人可以过马路,然后在行人通过十字路口时加速。在另一个例子中,车辆在从一条小街转向一条繁忙的主干道之前要等到几辆车经过。
虽然这项初步研究主要关注两个智能体之间的相互作用,但M2I可以推断出许多智能体之间的关系,然后通过连接多个边际和条件预测变量来猜测它们的轨迹。
真实世界驾驶考试
研究人员使用Waymo Open Motion数据集来训练模型,该数据集包含由安装在该公司自动驾驶汽车上的激光雷达(光探测和测距)传感器和摄像头记录的数百万个涉及车辆、行人和骑自行车者的真实交通场景。研究人员特别关注有多种病原体的病例。
为了确定准确性,研究人员将每种方法的六个预测样本(通过置信度加权)与场景中汽车、骑自行车者和行人的实际轨迹进行了比较。结果表明他们的方法是最准确的。该方法在称为重叠率的指标上也优于基线模型;如果两条轨道重叠,则表明发生了碰撞。M2I重叠率最低。
M2I的另一个好处是,因为它把问题分解成更小的部分,所以用户更容易理解模型的决定。研究人员表示,从长远来看,这可以帮助用户更加信任自动驾驶汽车。
然而,该框架无法解释两个代理之间的相互作用,例如两辆车在四个方向停车时向前推,因为司机不确定谁应该让步。
未来,研究人员计划解决这个问题。此外,他们还希望利用这种方法模拟道路使用者之间的真实互动,可以用来验证自动驾驶汽车的规划算法,或者创建大量的合成驾驶数据,从而提高模型性能。
1盖世汽车讯人类可能是全自动汽车进入城市街道的最大障碍之一。机器人必须能够预测附近司机、骑自行车的人和行人的行为,以便在波士顿市中心安全驾驶车辆。然而,行为预测的问题很难解决。目前的人工智能解决方案要么过于简单(可能假设行人总是走直线),要么过于保守(为了避开行人,机器人只是把车停在公园里),要么只能预测一个智能体的下一步行动(道路通常同时承载许多用户。)
据国外媒体报道,麻省理工学院(MIT)的研究人员设计了一个看似简单的解决方案。通过将多智能体行为预测问题分解为更小的部分,并分别处理每个部分,计算机可以实时解决这一复杂的任务。
图片来源:arxiv
研究者的行为预测框架会首先猜测两个道路使用者之间的关系,哪个汽车、骑自行车的人或行人有通行权,哪个智能体会让路,并利用这些关系来预测多个智能体的未来轨迹。
该研究的联合主要作者Xin“Cyrus”Huang表示:“将我们的模型与该领域其他最先进的模型(如Waymo的模型)进行比较,我们的模型在这个具有挑战性的基准中取得了最佳性能。”
多个小模型
研究人员将这种机器学习方法称为M2I,它需要两个输入:汽车、骑自行车的人和行人在交通环境(如十字路口)中交互的过去轨迹,以及带有街道位置和车道配置的地图。
使用该信息,关系预测器可以推断两个代理中的哪一个首先具有通行权,并且将一个分类为通过者,将另一个分类为通过者。然后一个预测模型(边际预测器)猜测通过代理(独立运行)的轨迹。
第二种预测模型,称为条件预测器,会根据通过agent的动作来猜测yield agent的动作。为了让步行者和路人预测许多不同的轨迹,系统分别计算每个轨迹的概率,然后选择出现概率最高的6个联合结果。
M2I输出预测这些智能体将如何在接下来的8秒内穿过交叉口。在一个例子中,研究方法使车辆减速,以便行人可以过马路,然后在行人通过十字路口时加速。在另一个例子中,车辆在从一条小街转向一条繁忙的主干道之前要等到几辆车经过。
虽然这项初步研究主要关注两个智能体之间的相互作用,但M2I可以推断出许多智能体之间的关系,然后通过连接多个边际和条件预测变量来猜测它们的轨迹。
真实世界驾驶考试
研究人员使用Waymo Open Motion数据集来训练模型,该数据集包含由安装在该公司自动驾驶汽车上的激光雷达(光探测和测距)传感器和摄像头记录的数百万个涉及车辆、行人和骑自行车者的真实交通场景。研究人员特别关注有多种病原体的病例。
为了确定准确性,研究人员将每种方法的六个预测样本(通过置信度加权)与场景中汽车、骑自行车者和行人的实际轨迹进行了比较。结果表明他们的方法是最准确的。该方法在称为重叠率的指标上也优于基线模型;如果两条轨道重叠,则表明发生了碰撞。M2I重叠率最低。
M2I的另一个好处是,因为它把问题分解成更小的部分,所以用户更容易理解模型的决定。研究人员表示,从长远来看,这可以帮助用户更加信任自动驾驶汽车。
然而,该框架无法解释两个代理之间的相互作用,例如两辆车在四个方向停车时向前推,因为司机不确定谁应该让步。
未来,研究人员计划解决这个问题。此外,他们还希望利用这种方法模拟道路使用者之间的真实互动,可以用来验证自动驾驶汽车的规划算法,或者创建大量的合成驾驶数据,从而提高模型性能。
标签:
盖世汽车讯据外媒报道,关注驾驶员与车队安全的人工智能(AI)与边缘计算(EdgeComputing)技术领导者Netradyne宣布推出其基于视觉的安全平台Driveri的新特性和功能,
1900/1/1 0:00:00据TheElec报道,三星SDI计划将用在Gen5电动车的电池堆叠技术运用到智能手机的电池上。据悉,这种技术通过提高能量密度,增加了电动汽车的续航里程并降低了成本。
1900/1/1 0:00:00自3月28日上海实施分区域封控以来,已有二十余天,集成电路产业的神经也一直紧绷着。作为全国最大的晶圆、硅片等半导体产品制造基地,上海集成电路产业的一举一动牵动着整个产业链。
1900/1/1 0:00:00盖世汽车讯CannabixTechnologiesInc公司是一家开发执法用大麻呼气测试仪的领先商家。据外媒报道,最近,该公司开发了一种尖端无接触酒精呼气测试仪,可用于车辆驾驶舱。
1900/1/1 0:00:00据《天空新闻》《卫报》等英媒19日报道,英国交通部提出的拟议交通法规修改方案显示,车辆自动驾驶期间,只要保持在一条车道上且行驶速度低于60公里小时,司机便可在汽车内置屏幕上观看电视和电影,
1900/1/1 0:00:00集度官宣激光雷达布局方案4月18日,集度官方发布了集度首款概念车车头部位的设计细节,包括车前灯和车前盖处激光雷达的设计。
1900/1/1 0:00:00