
头部图片来源:蔚来官方
作者|武笑羽
编辑|王艳
自2021年以来,特斯拉首席执行官埃隆·马斯克(elon musk)一直抱怨这是一种“昂贵而无用”的激光雷达。在新一轮的自动驾驶军备竞赛中,2022年面向汽车市场的多款新车已经搭载了激光雷达产品,成为汽车企业高端化、智能化的新卖点。
事实上,2021年初,蔚来最早打响了激光雷达之战。当时蔚来正式发布了ET7车型,并宣布搭载激光雷达,最远探测距离500米。这也是第一台量产的高性能激光雷达。
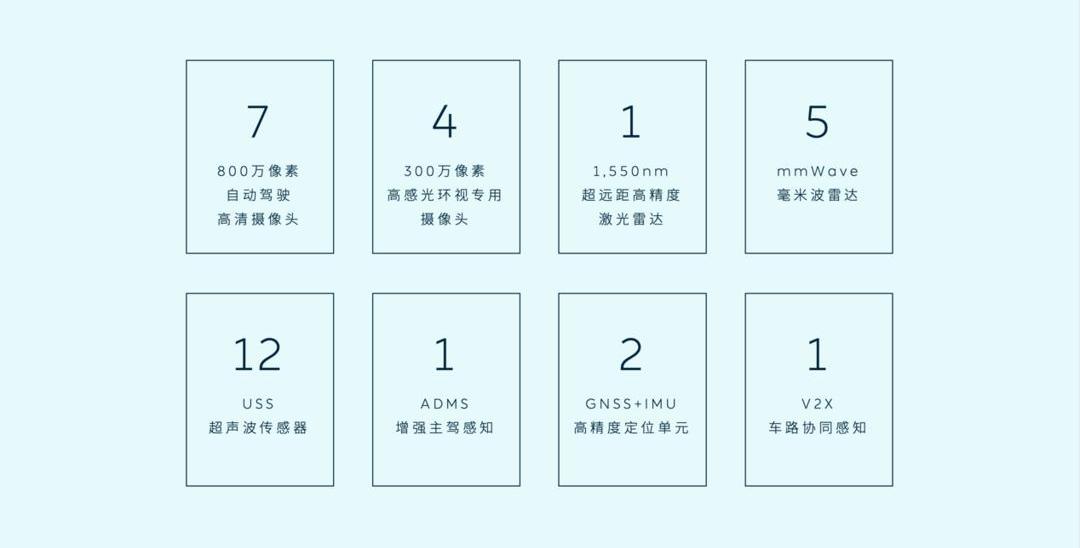
“我们选择的前向激光雷达具有120度的水平FOV和500米的最大探测距离。是目前已经量产的最远的激光雷达,可以解决车载场景的大部分问题。”蔚来智能硬件副总裁白剑介绍蔚来Aquila超感系统。
他说,在其他地点,蔚来搭载的侧向激光雷达多用于无保护的左转和超车。这个时候速度比较低。由四个横向8M摄像机和四个环形摄像机组成的视觉系统可以提供足够的深度信息,配合瞭望塔结构,可以帮助车辆应对测盲场景。
在白建看来,正是因为目前技术条件下的纯视觉方案无法解决深度信息的一些问题,“所以我们需要激光雷达的帮助。”
但是对于激光雷达的位置和数量,每个方案都不一样。几个月前,发布的双激光雷达计划引发了李公司创始人李想、汽车首席执行官夏和思朋汽车董事长何的讨论。在去年的广州车展上,机械龙甚至喊出了“4以下,请不要说话”。
白建认为,蔚来的优势在于自主研发的自动驾驶技术,包括硬件、操作系统、算法以及激光雷达的深度定制。蔚来的电路板是和图大通联合设计的。“如果你只是从供应商那里买了一个激光雷达放在车里,它的有效性必然会在各方面打折扣。”
今年第三季度,蔚来将开始交付NOP+增强导航辅助功能。白建说,有了激光雷达的加持,车辆对各种目标的探测距离会更强,看得更远更准。“所有依赖前瞻感知的功能都可以从中受益。”
白建于2020年11月加入蔚来汽车,目前主要负责蔚来智能硬件的研发。此前,白建是OPPO的硬件总监,小米芯片和前瞻研究部总经理。
蔚来告诉未来汽车日报,白剑是蔚来高P序列成员。P序列是蔚来的专业发展通道,蔚来P5相当于阿里P10,P5以上被认为是高P,意味着全球权威人才和行业突破。
以下是白建接受未来汽车日报等媒体采访时的对话:
激光雷达没有马斯克说的那么贵。
问:包括蔚来在内的很多车企都选择混合固态激光雷达。主要有哪些考虑?纯固态相对于机械旋转有什么优势?
白建:纯机械激光雷达由于成本和性能原因可能会逐渐淡出。
纯固态激光雷达的所有发射和接收都由传输系统完成。现在混合固态激光雷达有点棘手,用的是旋转部件。比如你要10000点,你需要10000个纯固态发射光源。如果是混合固态激光雷达,只需要几百个甚至几个,但是可以旋转,一次击中不同的地方。这是一种用时间换空间的方式。
纯固态激光雷达非常昂贵,体积庞大,很难上车。虽然大家都认可固态激光雷达的趋势,但是目前技术还不成熟,整个行业和供应链的逐步发展成熟还需要时间。
在未来很长一段时间内,混合固态是量产的主力雷达中性能最高的。混合固态方面,无论是振镜还是机械方式,成本上可能会略有差别,但是效果差距不是特别大。大家还是要注意它能不能“看得远,看得清……而且稳定”。
问:目前激光雷达的整体成本是多少?未来还有进一步下跌的空间吗?
白建:激光雷达确实很贵,但是没有外国朋友老板说的那么贵。
中国供应链的能力和设计水平特别擅长做这个(把激光雷达的成本持续压低)。目前,NT2上的激光雷达成本确实很高。有了量产规模,就有了相当的下沉空间和实力。我们非常期待持续快速的成本优化步伐。
"激光雷达的点数越多越好,但分辨率也越高."
问:对于自动驾驶的决策过程,不同传感器感知到的信息是否有不同的优先级?蔚来的战略是什么?激光雷达需要综合哪些因素?
白建:在蔚来目前的自动驾驶系统中,优先级最高的是激光雷达和11个摄像头,包括7个800万像素自动驾驶高清摄像头和4个300万像素高灵敏度全景摄像头。基本上所有场景都在用。从自动驾驶系统开发的第一天起,如何同步时间,如何对齐像素,如何对齐帧就已经被分配好了。
来源:蔚来
问:激光雷达和相机的感知是如何分布的?谁的决策水平更高,或者说激光雷达和相机的感知不同时,谁说了算?
白建:算法模型会独立处理不同传感器的数据,然后在融合模块中处理。
问:蔚来激光雷达和视觉相机的集成和普通朋友相比如何?
白衣剑卿:激光雷达和视觉必须深度融合。魏开发了自动驾驶技术,包括硬件、操作系统、算法和激光雷达深度定制。
在蔚来的整个自动驾驶系统中,我们首先设定系统级的要求,包括从算法的角度需要什么样的集成方式,自动驾驶还是辅助驾驶;然后再分解成子系统,包括激光雷达实现自己的设计目标;一旦设计完成,系统级对准必不可少,对准过程包括融合、内外参数校准、所有信息对准、时间融合等等。
问:几乎所有的新车公司都在布局自己的雷达业务。蔚来是怎么看待自研和合作的?
白建:蔚来不是万能的。我们首先是一家主机厂。对于我们来说,关键的零部件还是ECU,我们更愿意和合作伙伴一起成长,一起定制,一起发展。
问:市面上有一些激光雷达的激光器很多,甚至看到过多达128个这样的广告。这种雷达和蔚来的有什么原理上的区别和优缺点?
白建:激光雷达能不能看清楚,跟分辨率和激光点的数量有关系,但没有必然联系。激光点的数量较少,但通过更快地旋转电机和更快地扫描可以实现高分辨率。回到本质,一定要看分辨率。
128点,有128行。如果一个点断了,就会少一行,变成127行。如果一个感知,激光的每一帧图像都少了一条线,那条线正好在扫描一个非常关键的元素点,这对感知来说是非常可怕的。
激光雷达点的数量不是越多越好,而是分辨率越高,可靠性越高。
问:蔚来的自动驾驶方案是不是最好的?这个布局方案还有缺陷吗?
整个自动驾驶算法是不断进化的,现阶段测得的最优方案并不代表以后会一直用。从技术的发展趋势来看,人工智能的水平和芯片能力会越来越强,传感器的能力也会越来越强。在这种趋势下,有可能去掉一些传感器,或者增加一些传感器。蔚来更注重创新研发。我们不认为这个系统能赢天下,但它会继续进化。
来源:蔚来
未来五六年,还是要靠整合感知。
问:既然蔚来目前走的是多传感器、集成视知觉的路线,那么后期会选择纯视知觉的路线吗?
白建:就我所见,我不这么认为。至少在未来五六年内,我们很难让2D相机的信息达到瞬时计算深度、对焦和自动变焦。我们还是要靠积分法,用1+1 >;2的方式无限接近人的眼睛,算法和计算系统无限接近人脑。我相信只有这样才是自动驾驶的解决之道。
问:判断一台汽车级激光雷达的好坏有几个维度。需要考虑哪些具体的参数和功能?作为一个普通消费者,有什么方法可以鉴别一台激光雷达的好坏?
白建:我们判断激光雷达主要是看得远、看得清、看得稳。
问:单台激光雷达能否保证安全冗余和高水平自动驾驶探测的需求?
白建:整个自动驾驶的冗余不是光靠激光雷达就能完成的。现在,在整个NAD的系统设计中,从算法、软件、硬件到接收机,所有的功能安全设计都要考虑。这是一个系统级的设计。
比如蔚来NAD的控制器上有四个芯片,而且是两两互为备份。如果激光雷达发生故障,整个系统仍然可以依靠这些硬件来实现功能安全。我们应该确保一旦激光雷达出现问题,系统能够维持我们的运行并实现安全目标。

来源:蔚来
问:激光雷达的寿命是多少?相对于整车的生命周期,激光雷达是否提前退役,需要中途更换?
白建:蔚来汽车的每一个部件都有质量标准,其中一个就是使用寿命,激光雷达也是。激光雷达经过了严格的耐久性测试。根据系统的技术架构,它没有非常脆弱的组件,所以需要提前退役。激光雷达和整车其他部件的质量要求一样。
问:有些用车环境可能比较恶劣。用户不洗车,不爱车,对车一无所知。在这种情况下,激光雷达的稳定性如何,内部做了哪些测试?售后成本是多少?
白建:激光雷达系统会进行自检,自动驾驶系统也会进行系统级自检。他们有判断标准。如果激光雷达上有泥点或者污垢,这些东西已经覆盖了一定的比例,这就导致了点云质量已经下降到了无法承受的程度。蔚来会提醒用户,“激光雷达上面的窗户脏了,请清理一下。”我们还为用户准备了清洁服和类似海绵的刷子,用户可以清洁,没有任何成本问题。
如果把激光雷达安装在保险杠附近,碎石溅到路面上砸坏了激光雷达,容易造成维修问题。另一种是刮碰,车的左右后视镜或者保险杠很容易摩擦。而蔚来“瞭望塔”的布局位于楼顶,可以避免上述诸多问题。
另外,蔚来的激光雷达外膜都有硬化膜,厚度在3-4um左右。万一发生极小概率事件,比如轻微的卵石击中屋顶的激光雷达,我们已经测试过不会影响激光雷达的性能,所以不需要维修,用户可以放心使用。
问:整车下线如何检测和修正传感器,对生产节奏有什么影响?
白建:激光雷达流水线有出厂检验,我们也会对激光雷达的所有校准参数进行测试,做老化测试。装车后,我们还会进行外部参考校准测试和整车水平测试。其中,外部参数即激光雷达、相机和车载系统的标定测试,可以在三维坐标下保持一致。
具体来说,相机看到的是视野的某个方向。假设左前方200米处有一棵树,并且在视野中是水平垂直的,那么激光雷达必须看到的也必须是水平垂直的。我们会明确偏差的允许范围,超过这个范围就是不合格。
例如,这个测试只是数百个测试中的一个。我们将通过非常严格的测试和校准行动,确保整个系统的时间和空间维度严格同步。
问:下半年交付的NOP+会在哪里使用激光雷达?
白建:NOP+将在第三季度开始交付。在激光雷达的帮助下,各种目标的探测距离会更强,视觉会更远更准。所有依赖前瞻感知的功能都可以从中受益。
在用户日常用车过程中,最直接的……nd高频体验提升是跟车时加减速会更顺畅;前方有慢车时,车的减速会更及时,更舒适;被另一辆车切的时候,减速的时机和舒适度会更好。整体加减速表现更像人类驾驶员。
未来汽车日报
头部图片来源:蔚来官方
作者|武笑羽
编辑|王艳
自2021年以来,特斯拉首席执行官埃隆·马斯克(elon musk)一直抱怨这是一种“昂贵而无用”的激光雷达。在新一轮的自动驾驶军备竞赛中,2022年面向汽车市场的多款新车已经搭载了激光雷达产品,成为汽车企业高端化、智能化的新卖点。
事实上,2021年初,蔚来最早打响了激光雷达之战。当时蔚来正式发布了ET7车型,并宣布搭载激光雷达,最远探测距离500米。这也是第一台量产的高性能激光雷达。
“我们选择的前向激光雷达具有120度的水平FOV和500米的最大探测距离。是目前已经量产的最远的激光雷达,可以解决车载场景的大部分问题。”蔚来智能硬件副总裁白剑介绍蔚来Aquila超感系统。
他说,在其他地点,蔚来搭载的侧向激光雷达多用于无保护的左转和超车。这个时候速度比较低。由四个横向8M摄像机和四个环形摄像机组成的视觉系统可以提供足够的深度信息,配合瞭望塔结构,可以帮助车辆应对测盲场景。
在白建看来,正是因为目前技术条件下的纯视觉方案无法解决深度信息的一些问题,“所以我们需要激光雷达的帮助。”
但是对于激光雷达的位置和数量,每个方案都不一样。几个月前,发布的双激光雷达计划引发了李公司创始人李想、汽车首席执行官夏和思朋汽车董事长何的讨论。在去年的广州车展上,机械龙甚至喊出了“4以下,请不要说话”。
白建认为,蔚来的优势在于自主研发的自动驾驶技术,包括硬件、操作系统、算法以及激光雷达的深度定制。蔚来的电路板是和图大通联合设计的。“如果你只是从供应商那里买了一个激光雷达放在车里,它的有效性必然会在各方面打折扣。”
今年第三季度,蔚来将开始交付NOP+增强导航辅助功能。白建说,有了激光雷达的加持,车辆对各种目标的探测距离会更强,看得更远更准。“所有依赖前瞻感知的功能都可以从中受益。”
白建于2020年11月加入蔚来汽车,目前主要负责蔚来智能硬件的研发。此前,白建是OPPO的硬件总监,小米芯片和前瞻研究部总经理。
蔚来告诉未来汽车日报,白剑是蔚来高P序列成员。P序列是蔚来的专业发展通道,蔚来P5相当于阿里P10,P5以上被认为是高P,意味着全球权威人才和行业突破。
以下是白建接受未来汽车日报等媒体采访时的对话:
激光雷达没有马斯克说的那么贵。
问:包括蔚来在内的很多车企都选择混合固态激光雷达。主要有哪些考虑?纯固态相对于机械旋转有什么优势?
白建:纯机械激光雷达由于成本和性能原因可能会逐渐淡出。
纯固态激光雷达的所有发射和接收都由传输系统完成。现在混合固态激光雷达有点棘手,用的是旋转部件。比如你要10000点,你需要10000个纯固态发射光源。如果是混合固态激光雷达,只需要几百个甚至几个,但是可以旋转,一次击中不同的地方。这是一种用时间换空间的方式。
纯固态激光雷达非常昂贵,体积庞大,很难上车。虽然大家都认可固态激光雷达的趋势,但是目前技术还不成熟,整个行业和供应链的逐步发展成熟还需要时间。
在未来很长一段时间内,混合固态是量产的主力雷达中性能最高的。就混合固态而言,无论是振动……rror或者机械的方法,成本上可能会略有差别,但是效果差距不是特别大。大家还是需要关注它是否能“看得远、看得清、看得稳”。
问:目前激光雷达的整体成本是多少?未来还有进一步下跌的空间吗?
白建:激光雷达确实很贵,但是没有外国朋友老板说的那么贵。
中国供应链的能力和设计水平特别擅长做这个(把激光雷达的成本持续压低)。目前,NT2上的激光雷达成本确实很高。有了量产规模,就有了相当的下沉空间和实力。我们非常期待持续快速的成本优化步伐。
"激光雷达的点数越多越好,但分辨率也越高."
问:对于自动驾驶的决策过程,不同传感器感知到的信息是否有不同的优先级?蔚来的战略是什么?激光雷达需要综合哪些因素?
白建:在蔚来目前的自动驾驶系统中,优先级最高的是激光雷达和11个摄像头,包括7个800万像素自动驾驶高清摄像头和4个300万像素高灵敏度全景摄像头。基本上所有场景都在用。从自动驾驶系统开发的第一天起,如何同步时间,如何对齐像素,如何对齐帧就已经被分配好了。
来源:蔚来
问:激光雷达和相机的感知是如何分布的?谁的决策水平更高,或者说激光雷达和相机的感知不同时,谁说了算?
白建:算法模型会独立处理不同传感器的数据,然后在融合模块中处理。
问:蔚来激光雷达和视觉相机的集成和普通朋友相比如何?
白衣剑卿:激光雷达和视觉必须深度融合。魏开发了自动驾驶技术,包括硬件、操作系统、算法和激光雷达深度定制。
在蔚来的整个自动驾驶系统中,我们首先设定系统级的要求,包括从算法的角度需要什么样的集成方式,自动驾驶还是辅助驾驶;然后再分解成子系统,包括激光雷达实现自己的设计目标;一旦设计完成,系统级对准必不可少,对准过程包括融合、内外参数校准、所有信息对准、时间融合等等。
问:几乎所有的新车公司都在布局自己的雷达业务。蔚来是怎么看待自研和合作的?
白建:蔚来不是万能的。我们首先是一家主机厂。对于我们来说,关键的零部件还是ECU,我们更愿意和合作伙伴一起成长,一起定制,一起发展。
问:市面上有一些激光雷达的激光器很多,甚至看到过多达128个这样的广告。这种雷达和蔚来的有什么原理上的区别和优缺点?
白建:激光雷达能不能看清楚,跟分辨率和激光点的数量有关系,但没有必然联系。激光点的数量较少,但通过更快地旋转电机和更快地扫描可以实现高分辨率。回到本质,一定要看分辨率。
128点,有128行。如果一个点断了,就会少一行,变成127行。如果一个感知,激光的每一帧图像都少了一条线,那条线正好在扫描一个非常关键的元素点,这对感知来说是非常可怕的。
激光雷达点的数量不是越多越好,而是分辨率越高,可靠性越高。
问:蔚来的自动驾驶方案是不是最好的?这个布局方案还有缺陷吗?
整个自动驾驶算法是不断进化的,现阶段测得的最优方案并不代表以后会一直用。从技术的发展趋势来看,人工智能的水平和芯片能力会越来越强,传感器的能力也会越来越强。在这种趋势下,有可能去掉一些传感器,或者增加一些传感器。蔚来更注重创新研发。我们不认为这个系统能赢天下,但它会继续进化。
来源:蔚来
未来五六年,还是要靠整合感知。
问:既然蔚来目前走的是多传感器、集成视知觉的路线,那么后期会选择纯视知觉的路线吗?
白建:就我所见,我不这么认为。至少在未来五六年内,我们很难让2D相机的信息达到瞬时计算深度、对焦和自动变焦。我们还是要靠积分法,用1+1 >;2的方式无限接近人的眼睛,算法和计算系统无限接近人脑。我相信只有这样才是自动驾驶的解决之道。
问:判断一台汽车级激光雷达的好坏有几个维度。需要考虑哪些具体的参数和功能?作为一个普通消费者,有什么方法可以鉴别一台激光雷达的好坏?
白建:我们判断激光雷达主要是看得远、看得清、看得稳。
问:单台激光雷达能否保证安全冗余和高水平自动驾驶探测的需求?
白建:整个自动驾驶的冗余不是光靠激光雷达就能完成的。现在,在整个NAD的系统设计中,从算法、软件、硬件到接收机,所有的功能安全设计都要考虑。这是一个系统级的设计。
比如蔚来NAD的控制器上有四个芯片,而且是两两互为备份。如果激光雷达发生故障,整个系统仍然可以依靠这些硬件来实现功能安全。我们应该确保一旦激光雷达出现问题,系统能够维持我们的运行并实现安全目标。
来源:蔚来
问:激光雷达的寿命是多少?相对于整车的生命周期,激光雷达是否提前退役,需要中途更换?
白建:蔚来汽车的每一个部件都有质量标准,其中一个就是使用寿命,激光雷达也是。激光雷达经过了严格的耐久性测试。根据系统的技术架构,它没有非常脆弱的组件,所以需要提前退役。激光雷达和整车其他部件的质量要求一样。
问:有些用车环境可能比较恶劣。用户不洗车,不爱车,对车一无所知。在这种情况下,激光雷达的稳定性如何,内部做了哪些测试?售后成本是多少?
白建:激光雷达系统会进行自检,自动驾驶系统也会进行系统级自检。他们有判断标准。如果激光雷达上有泥点或者污垢,这些东西已经覆盖了一定的比例,这就导致了点云质量已经下降到了无法承受的程度。蔚来会提醒用户,“激光雷达上面的窗户脏了,请清理一下。”我们还为用户准备了清洁服和类似海绵的刷子,用户可以清洁,没有任何成本问题。
如果把激光雷达安装在保险杠附近,碎石溅到路面上砸坏了激光雷达,容易造成维修问题。另一种是刮碰,车的左右后视镜或者保险杠很容易摩擦。而蔚来“瞭望塔”的布局位于楼顶,可以避免上述诸多问题。
另外,蔚来的激光雷达外膜都有硬化膜,厚度在3-4um左右。万一发生极小概率事件,比如轻微的卵石击中屋顶的激光雷达,我们已经测试过不会影响激光雷达的性能,所以不需要维修,用户可以放心使用。
问:整车下线如何检测和修正传感器,对生产节奏有什么影响?
白建:激光雷达流水线有出厂检验,我们也会对激光雷达的所有校准参数进行测试,做老化测试。装车后,我们还会进行外部参考校准测试和整车水平测试。其中,外部参数即激光雷达、相机和车载系统的标定测试,可以在三维坐标下保持一致。
具体来说,相机看到的是视野的某个方向。假设左前方200米处有一棵树,并且在视野中是水平垂直的,那么激光雷达必须看到的也必须是水平垂直的。我们会明确偏差的允许范围,超过这个范围就是不合格。
例如,这个测试只是数百个测试中的一个。我们将通过非常严格的测试和校准行动,确保整个系统的时间和空间维度严格同步。
问:下半年交付的NOP+会在哪里使用激光雷达?
白建:NOP+将在第三季度开始交付。在激光雷达的帮助下,各种目标的探测距离会更强,视觉会更远更准。所有依赖前瞻感知的功能都可以从中受益。
在用户日常用车过程中,最直接的……nd高频体验提升是跟车时加减速会更顺畅;前方有慢车时,车的减速会更及时,更舒适;被另一辆车切的时候,减速的时机和舒适度会更好。整体加减速表现更像人类驾驶员。
未来汽车日报
2022年7月1日,理想汽车公布2022年6月交付数据。2022年6月,理想汽车交付13024辆理想ONE,同比2021年6月增长689。
1900/1/1 0:00:00上交所6月30日晚间披露,成都锐成芯微科技股份有限公司(简称“锐成芯微”)科创板IPO申请获受理。公司本次拟公开发行股份不超过184776万股,募集资金总额不超过1304亿元。
1900/1/1 0:00:007月1日,哪吒汽车公布6月交付量,哪吒V和哪吒U共交付13157台,同比增长156。2022年1月至6月,累计交付63131台,同比增长199。
1900/1/1 0:00:002022年7月1日,杭州今日,零跑汽车正式发布2022年6月交付数据,当月共计交付11259台,创历史新高,上半年累计交付量同比增长超265,站稳造车新势力第一阵营。
1900/1/1 0:00:007月1日,理想汽车官方微信公众号发布“《七年之想》理想汽车七周年品牌书”,
1900/1/1 0:00:007月1日,零跑汽车正式发布2022年6月交付数据,当月共计交付11259台,创历史新高,上半年累计交付51994台,同比增长超265。
1900/1/1 0:00:00