什么是车载以太网?为什么汽车的智能网联、自动驾驶、无人驾驶甚至智能驾驶舱的发展都离不开车载以太网?接下来,我们简单介绍一下车载以太网。汽车以太网是一种新的局域网技术,通过以太网连接汽车中的电子单元。传输介质为单对非屏蔽双绞线或光纤,传输速率为100 Mbit/s ~ 10 Gbit/s,同时也满足汽车行业对高可靠性、低电磁辐射、低功耗、带宽分配、低延迟、严格实时同步的要求。在国际上,博通、恩智浦、宝马等公司都开展了星载以太网相关配套产品的开发。目前部分中高端车型已经采用车载以太网进行通信,如奥迪A8采用车载以太网作为通信框架,大众ID4采用车载以太网360°全景影像。在国内,以上海欣捷为代表的企业专注于车载以太网全栈技术的研究。自成立以来,何谦科技专注于车载以太网配套产品的开发,为汽车智能网联、ADAS、自动驾驶、无人驾驶等功能的开发提供基于车载以太网作为骨干网络的通信动脉。图1是基于车辆以太网作为主干网络的区域网关架构的示意图。域控制器,如自动驾驶域控制器和驾驶舱域控制器,车身周围的环境传感器,如:车载以太网摄像头(Eth Camera),车载以太网毫米波雷达(Eth mmWave radar),车载以太网激光雷达等。根据需要,域控制器通过车载以太网总线连接TSN网关,与中央计算平台或环境感知传感器交换数据。环境传感器采集环境数据,通过车载以太网总线传输到相应的TSN网关进行数据交换,再由相应的TSN网关将相应的数据传输到中央计算平台进行运算处理,或者由中央计算平台通过TSN网关将数据传输到域控制器进行决策或者传输到车载以太网屏幕进行显示。同时,TSN网关兼容CAN和CAN-FD通信,通过CAN总线和CAN-FD总线与相应的CAN ECU交换信息。
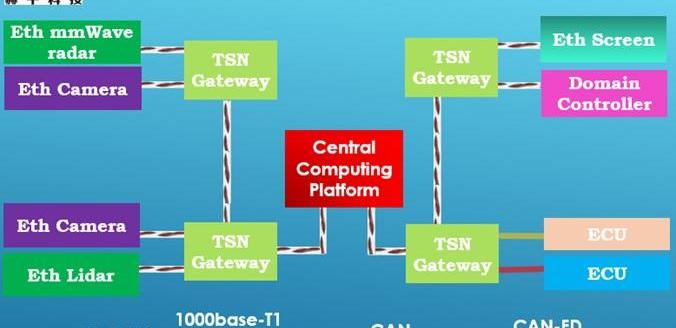
图1基于车载以太网的区域网关架构
想想吧。如果图1中的区域网关架构使用传统的CAN总线、FlexRay总线或MOST总线进行通信,而不是车载以太网总线,并且如果该架构被配备L4/L5自动驾驶功能的车辆采用,则多个相机与激光雷达之间的时间同步可能不够准确,导致图像数据与点云数据不匹配。驾驶舱控制器显示屏上的驾驶策略可能与扬声器发出的提示声不同步,或者传感器采集传感数据并传输到自动驾驶控制器的时间延迟达不到要求,所以毫无疑问L4/L5的自动驾驶车辆只停留在演示车上,无法真正实现L4/L5的自动驾驶功能。因此,车载网络中各节点的准确时间同步对于实现L4/L5的自动驾驶功能至关重要,基于车载以太网作为骨干网络的通信具有时间同步功能,可以满足要求。
目前基于车载以太网的时间同步功能是基于gPTP协议的,但在实际应用中,由于异常情况等原因,时钟同步信息消失,导致时钟同步中断。时钟同步信息丢失后如何快速同步仍然是车载以太网时间同步功能需要解决的关键问题。为了找出星载以太网时间同步技术的改进路线,我们在国家专利数据库中查询了星载以太网时间同步技术的相关专利。通过查询,我们了解到韩国现代汽车有限公司申请了更多的r……国际上星载以太网的时间同步。在国内,高校和科研院所,同济大学申请了车载以太网时间同步专利。在企业中,HingeTech拥有的车载以太网时间同步授权专利较多。更有意思的是,我们看了上海何谦电子科技有限公司时间同步专利的相关专利,刚刚发现其中有一项专利号为201911214729.8,是一项应用于主钟和从钟的时间同步校正方法和装置的专利。该专利为基于gPTP协议的时钟同步信息丢失后如何快速同步提供了可行的解决方案。具体要点如下:
从时钟接收到主时钟发送的同步时间报文后,计算主时钟和从时钟之间的时钟偏移,通过时钟偏移修正从时钟的时钟偏移,而不修正从时钟的时钟频率;只有在指定时间后,时钟偏移和时钟频率偏移才能同步校正。
以预设调频时间为起始位置,跟踪预设时间段内主时钟和从时钟之间的时钟频偏,预测主时钟和从时钟之间的时钟频偏趋势;
比如根据用户需求设置测量时长。假设从Ts_2到Ts_k的测试持续时间已经过去,主从时钟将在测试持续时间内被校正。具体计算公式如下:

在公式(1)中,Offset_i是第I次的时钟偏移,其中I从第2次开始计数;在公式(2)中,Offset_total是从Ts_2到ts _ k的预设时间段内所有主时钟和从时钟的时钟偏移。
因此,根据公式(1)至公式(4),通过计算时钟频率的校正结果来校正从时钟的时钟频率,使得主时钟和从时钟保持精确的时钟同步。
根据HingeTech公开专利提供的实测数据,将HigPTP的时间同步校正方法与现有技术中LinuxPTP的时钟同步校正方法进行对比,如图2所示。结果显示,10分钟后,时钟偏移从最初的31477ns变为95344 ns,相差95344 ns/10min,换算成秒为99.8nm/s。然而,当采用HigPTP方法时,10分钟后,时钟偏移从最初的31044ns变为23243ns。与LinuxPTP方法相比,时差缩小到7801ns/10min,换算成秒只有13nm/s,时钟同步精度提高了8倍左右。因此,HigPTP时间同步后,主时钟和从时钟的时间同步精度相比现有技术有了很大的提高..
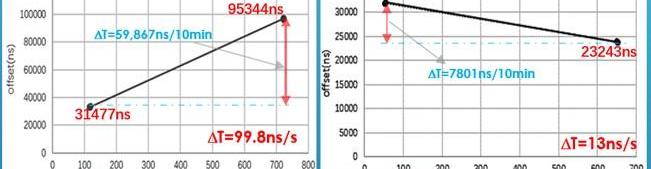
图2何谦技术提供的HigPTP方法和现有LinuxPTP方法的主时钟和从时钟校正结果对比。
根据上面的介绍,我们可以知道,目前国内外很多机构和企业都还在专注于车载以太网精确时间同步技术的研究。如图3所示,集中式区域网关架构采用车载以太网的时间同步方案。假设HiPTP方案,我们可以看到自动驾驶域控制器作为主时钟,根据主时钟,使用HiPTP方案同步车载以太网摄像头和车载以太网激光雷达的时钟,同时同步TSN网关的时钟。由于TSN网关通过机载以太网总线与不同的域控制器相连,因此选择TSN网关作为主时钟,通过HigPTP实现电源域控制器、底盘域控制器、车身域控制器和驾驶舱域控制器的时钟精确同步。通过HigPTP的时钟同步方法,可以完成以车载以太网为骨干网的各个节点的精确时钟同步。

图3基于车载以太网作为骨干网的精确时钟同步技术方案。
如果搭载L4/L5的自动驾驶车辆采用HigPTP方案,由于具有精确时间同步功能,车载以太网激光雷达和车载以太网摄像机的时钟可以精确同步,从而实现点云数据和影像数据的同步采集和精确匹配。可以控制传感器收集的传感数据传输到自动驾驶域控制器的延迟,驾驶舱控制器播放的提示音也能始终与屏幕上显示的内容保持同步,那么L4/L5自动驾驶车辆就成为了真正的自动驾驶车辆。可见,车载以太网对于汽车智能联网、ADAS、智能驾驶舱、自动驾驶等功能非常重要。可喜的是,目前国内已有何谦科技等众多优秀的高科技企业在从事相关研究和配套产品的量产。随着汽车智能化的不断推进,相信在不久的将来,基于车载以太网总线的配套产品一定会在汽车智能化的浪潮中铺开。什么是车载以太网?为什么汽车的智能网联、自动驾驶、无人驾驶甚至智能驾驶舱的发展都离不开车载以太网?接下来,我们简单介绍一下车载以太网。汽车以太网是一种新的局域网技术,通过以太网连接汽车中的电子单元。传输介质为单对非屏蔽双绞线或光纤,传输速率为100 Mbit/s ~ 10 Gbit/s,同时也满足汽车行业对高可靠性、低电磁辐射、低功耗、带宽分配、低延迟、严格实时同步的要求。在国际上,博通,…XP、宝马等公司都进行了星载以太网相关配套产品的开发。目前部分中高端车型已经采用车载以太网进行通信,如奥迪A8采用车载以太网作为通信框架,大众ID4采用车载以太网360°全景影像。在国内,以上海欣捷为代表的企业专注于车载以太网全栈技术的研究。自成立以来,何谦科技专注于车载以太网的配套产品开发,为汽车智能网联、ADAS、自动驾驶、无人驾驶等功能的开发提供基于车载以太网作为骨干网络的通信动脉。图1是基于车辆以太网作为主干网络的区域网关架构的示意图。域控制器,如自动驾驶域控制器和驾驶舱域控制器,车身周围的环境传感器,如:车载以太网摄像头(Eth Camera),车载以太网毫米波雷达(Eth mmWave radar),车载以太网激光雷达等。根据需要,域控制器通过车载以太网总线连接TSN网关,与中央计算平台或环境感知传感器交换数据。环境传感器采集环境数据,通过车载以太网总线传输到相应的TSN网关进行数据交换,再由相应的TSN网关将相应的数据传输到中央计算平台进行运算处理,或者由中央计算平台通过TSN网关将数据传输到域控制器进行决策或者传输到车载以太网屏幕进行显示。同时,TSN网关兼容CAN和CAN-FD通信,通过CAN总线和CAN-FD总线与相应的CAN ECU交换信息。
图1基于车载以太网的区域网关架构
想想吧。如果图1中的区域网关架构使用传统的CAN总线、FlexRay总线或MOST总线进行通信,而不是车载以太网总线,并且如果该架构被配备L4/L5自动驾驶功能的车辆采用,则多个相机与激光雷达之间的时间同步可能不够准确,导致图像数据与点云数据不匹配。驾驶舱控制器显示屏上的驾驶策略可能与扬声器发出的提示声不同步,或者传感器采集传感数据并传输到自动驾驶控制器的时间延迟达不到要求,所以毫无疑问L4/L5的自动驾驶车辆只停留在演示车上,无法真正实现L4/L5的自动驾驶功能。因此,车载网络中各节点的准确时间同步对于实现L4/L5的自动驾驶功能至关重要,基于车载以太网作为骨干网络的通信具有时间同步功能,可以满足要求。
目前基于车载以太网的时间同步功能是基于gPTP协议的,但在实际应用中,由于异常情况等原因,时钟同步信息消失,导致时钟同步中断。时钟同步信息丢失后如何快速同步仍然是车载以太网时间同步功能需要解决的关键问题。为了找出星载以太网时间同步技术的改进路线,我们在国家专利数据库中查询了星载以太网时间同步技术的相关专利。通过查询,我们了解到韩国现代汽车公司在国际上申请了更多与车载以太网时间同步相关的专利。在国内,高校和科研院所,同济大学申请了车载以太网时间同步专利。在企业中,HingeTech拥有的车载以太网时间同步授权专利较多。更有意思的是,我们看了上海何谦电子科技有限公司时间同步专利的相关专利,刚刚发现其中有一项专利号为201911214729.8,是一项应用于主钟和从钟的时间同步校正方法和装置的专利。本专利为时钟同步信息b……后如何快速同步提供了可行的解决方案关于gPTP协议的ed丢失。具体要点如下:
从时钟接收到主时钟发送的同步时间报文后,计算主时钟和从时钟之间的时钟偏移,通过时钟偏移修正从时钟的时钟偏移,而不修正从时钟的时钟频率;只有在指定时间后,时钟偏移和时钟频率偏移才能同步校正。
以预设调频时间为起始位置,跟踪预设时间段内主时钟和从时钟之间的时钟频偏,预测主时钟和从时钟之间的时钟频偏趋势;
比如根据用户需求设置测量时长。假设从Ts_2到Ts_k的测试持续时间已经过去,主从时钟将在测试持续时间内被校正。具体计算公式如下:
在公式(1)中,Offset_i是第I次的时钟偏移,其中I从第2次开始计数;在公式(2)中,Offset_total是从Ts_2到ts _ k的预设时间段内所有主时钟和从时钟的时钟偏移。
因此,根据公式(1)至公式(4),通过计算时钟频率的校正结果来校正从时钟的时钟频率,使得主时钟和从时钟保持精确的时钟同步。
根据HingeTech公开专利提供的实测数据,将HigPTP的时间同步校正方法与现有技术中LinuxPTP的时钟同步校正方法进行对比,如图2所示。结果显示,10分钟后,时钟偏移从最初的31477ns变为95344 ns,相差95344 ns/10min,换算成秒为99.8nm/s。然而,当采用HigPTP方法时,10分钟后,时钟偏移从最初的31044ns变为23243ns。与LinuxPTP方法相比,时差缩小到7801ns/10min,换算成秒只有13nm/s,时钟同步精度提高了8倍左右。因此,HigPTP时间同步后,主时钟和从时钟的时间同步精度相比现有技术有了很大的提高..
图2何谦技术提供的HigPTP方法和现有LinuxPTP方法的主时钟和从时钟校正结果对比。
根据上面的介绍,我们可以知道,目前国内外很多机构和企业都还在专注于车载以太网精确时间同步技术的研究。如图3所示,集中式区域网关架构采用车载以太网的时间同步方案。假设HiPTP方案,我们可以看到自动驾驶域控制器作为主时钟,根据主时钟,使用HiPTP方案同步车载以太网摄像头和车载以太网激光雷达的时钟,同时同步TSN网关的时钟。由于TSN网关通过机载以太网总线与不同的域控制器相连,因此选择TSN网关作为主时钟,通过HigPTP实现电源域控制器、底盘域控制器、车身域控制器和驾驶舱域控制器的时钟精确同步。通过HigPTP的时钟同步方法,可以完成以车载以太网为骨干网的各个节点的精确时钟同步。
图3基于车载以太网作为骨干网的精确时钟同步技术方案。
如果搭载L4/L5的自动驾驶车辆采用HigPTP方案,由于具有精确时间同步功能,车载以太网激光雷达和车载以太网摄像机的时钟可以精确同步,从而实现点云数据和影像数据的同步采集和精确匹配。可以控制传感器收集的传感数据传输到自动驾驶域控制器的延迟,驾驶舱控制器播放的提示音也能始终与屏幕上显示的内容保持同步,那么L4/L5自动驾驶车辆就成为了真正的自动驾驶车辆。可见,车载以太网对于汽车智能联网、ADAS、智能驾驶舱、自动驾驶等功能非常重要。可喜的是,目前国内已有何谦科技等众多优秀的高科技企业在从事相关研究和配套产品的量产。随着汽车智能化的不断推进,相信在不久的将来,基于车载以太网总线的配套产品一定会在汽车智能化的浪潮中铺开。
由中国科学技术协会、北京市人民政府、海南省人民政府、科学技术部、工业和信息化部、生态环境部、住房和城乡建设部、交通运输部、国家市场监督管理总局、国家能源局联合主办的第四届世界新能源汽车大会(WNE
1900/1/1 0:00:001、极狐阿尔法ST小王子限量款2022成都车展正式上市2883万元到35
1900/1/1 0:00:008月26日,国轩高科公布2022半年报。报告期内,公司实现营业收入人民币8638亿元,同比增长14324。归属于上市公司股东的净利润为人民币6462万元,同比增长3415。
1900/1/1 0:00:001、微软首次发布汽车和移动出行整体解决方案8月28日,在2022世界新能源汽车大会上,微软首次发布面向汽车和移动出行领域的整体解决方案,以微软全球领先的智能云与智能边缘技术为基础,
1900/1/1 0:00:00日前,理想汽车发布了《理想L9参数询价交付时间延期公告》,在公告中表示,由于四川地区限电,绵阳增程器工厂供应延迟,导致理想L9开启交付的时间延期。
1900/1/1 0:00:00盖世汽车讯据外媒报道,通用在8月26日宣布,该公司负责生产GMC和雪佛兰品牌皮卡车型的墨西哥主要工厂将在次周因供应链问题而暂停生产。
1900/1/1 0:00:00