
作者/采购订单
编辑/Po
制作/阿保1990
实际上,在讨论此事之前,我们先来回顾一下2020年11月小鹏汽车的何小鹏和特斯拉的马斯克激光雷达的路线是否适合L3及以上的自动驾驶路线,这在网上引起了非常热烈的讨论。
在自动驾驶日,马斯克曾强调激光雷达是跛脚的。他认为激光雷达捕捉到的点云数据缺少信息。虽然有空间信息,但它没有颜色,没有图案,无法区分静止状态下的动态和静态对象,也无法区分特征类型。
在自动驾驶日,也有记者问马斯克:在自动驾驶中一个困难的99.999%节点上,激光雷达会成为更好的冗余解决方案吗?
然而,马斯克直接给出了更无情的回应,称激光雷达是一种工具的错误,毫无用处,而业内那些将激光雷达作为主要传感方法的人也是注定要失败的。
他的理由很简单,因为激光雷达对于自动驾驶应用来说既昂贵又不必要。马斯克甚至用附录来描述激光雷达。一个阑尾已经够糟糕的了,再加上一堆阑尾,这太荒谬了。
综上所述,马斯克或特斯拉对激光雷达的观点可以总结如下:
机械式激光雷达丑陋而昂贵,是一种不可替代的视觉解决方案
小鹏汽车确实是公认的特斯拉追随者。除了专注于智能化,尤其是在类似特斯拉的辅助驾驶策略方面,小鹏汽车在产品端也有很多细节和逻辑,这在特斯拉的阴影下可见一斑。
既然特斯拉的道路已经被证明是可行的,那么选择性地遵循它实际上是一种安全的策略。
然而,当谈到激光雷达问题时,小鹏汽车已经随波逐流了。
在本届上海车展上,小鹏P5直接将20W的电动车送给了火箭。P5实际上提供了一个激光雷达,这是大疆Livox为小鹏P5提供的第一个汽车级激光雷达HAP。HAP利用Livox自主研发的“超帧率”激光雷达探测技术,可以探测150米外反射率低至10%的物体(如黑色汽车),横向视场角为120度,角分辨率为0.16度X0.2度,点云密度相当于144线激光雷达。此外,大疆在激光雷达的布局上也有许多创新,可以与双目摄像头或左右后视镜集成。
关于采访中使用激光雷达的考虑,何小鹏的回应如下:
我们不同于做第四代自动辅助驾驶或他们所谓的自动驾驶的传统公司。他们以激光雷达为核心绘制高精度的激光雷达地图。与我们不同的是,我们以视觉为核心,以视觉高精度地图为核心。因为我们相信,从趋势的角度来看,世界各地的所有道路、红绿灯和法规都是从人眼和其他因素的角度来驱动的。我相信这是结合激光雷达可以安全完成的最高效、最接近真人、最便宜的事情。老实说,在最初的几年里,我们将把安全因素放在一个非常、非常、非常重要的角度。我们宁愿有硬件冗余或软件冗余,我们也应该做好安全工作
小鹏汽车仍然使用视觉感知作为核心感知方法,激光雷达的作用是作为一种安全冗余。对于小鹏汽车和大多数企业来说,集成激光雷达和摄像头数据进行感知是非常有意义的。

ADAS过程中传感器的生长过程
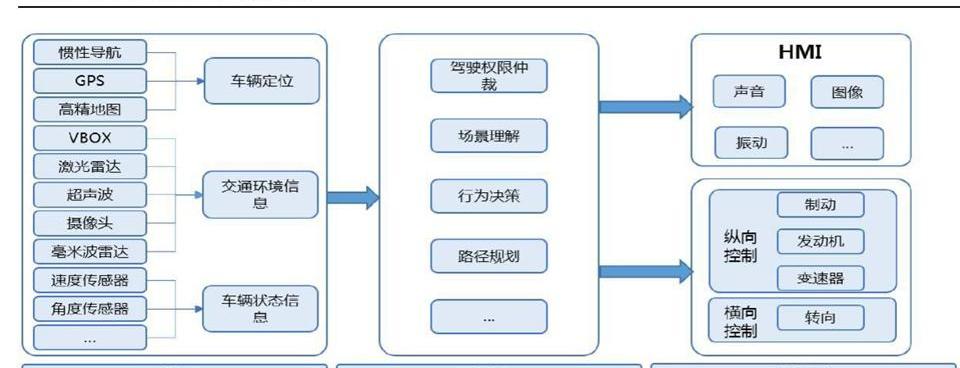
它仍然是自动驾驶的经典三大架构,即感知层、决策层和执行层。
感知层:主要由激光雷达、摄像头、高精度地图、IMU/GPS等组件组成,主要负责收集车辆周围的信息;
决策层:基于感知信息数据,从高计算能力的计算中心获得优化的驾驶决策;
执行层:根据决策层提供的驾驶决策,向制动系统、发动机转向和其他控制装置发出指令,负责驾驶执行;
自动驾驶的基本原理和过程如下:首先,通过感知层(包
包括物体建模和车辆定位,然后利用感知层输出的信息进行决策规划,向执行端发出指令,
最后,执行端控制车辆的实际行为。
自动驾驶从L2级升级到L3级,意味着从辅助驾驶向自动驾驶的跨越,对高精度建模和海量实时计算的需求呈指数级增长。其背后的技术难度也大幅增加,关键环节是前端感知,即如何感知和构建完整的路况模型。
为了理解这些系统,我们可以回忆一下我们通常是如何驾驶的:
第一个方面是眼睛对环境的感知:车道的位置,前方是否有车辆,以及红灯和绿灯的交换。这些任务都是由超高性能仿生相机——眼睛完成的,它具有超广角、快速对焦、无级调光、双目即时测距和自我修复损伤的功能。
更重要的是,这款仿生相机配备了强大的人工智能处理器,可以自动完成图像处理(如清除毛细血管中的障碍物、插入框架以完成盲点像素等)、物体识别、轨迹预测(前方车辆即将转弯),并将信息报告给“上层意识”。
此外,这是大脑的行为决策:根据环境感知信息来确定车辆需要执行的控制策略,例如前方车辆停车时是否需要紧急制动。还应该提到的是,“今天是否走高速公路”等路径规划也属于广泛的决策功能。
还有手动控制执行:驾驶员的神经和四肢在收到来自大脑的决策指令后,将油门、刹车和方向盘作为人车交互的两个主要媒介,与整个汽车系统一起承担车辆控制的功能。因此,目前AD AS系统中最困难和最关键的方面仍然是感知系统。
感知实际上是人类眼睛和耳朵的替代品,驾驶环境中最重要的两个因素是它是什么,其次是它运动的大小和速度。在驾驶时,我们会根据看到的物体和它们移动的速度做出相应的判断。
感知系统中有这么多传感器,让我们先看看类似人眼的摄像头。

视觉处理技术
捕捉一些东西还不容易。如今,手机图像识别技术不能用复杂来形容,它可以被认为是完美的顶峰。汽车的使用仍然有很多困难吗?图像识别已被应用于购物、场景识别和图像识别等各个领域。我的华为手机上的照片可以直接识别它是什么,价格是多少,在哪里买。
让我们先来看看这个使用最简单形式的面部购物识别的技术过程。

面部识别支付技术使用安装在设备上的高清摄像头。当消费者进行支付时,摄像头会智能地收集和提取面部特征。它可以从不同角度收集静态和动态的面部特征,实现身份识别,具有很高的安全性和便利性。
人脸支付识别系统流程
1.人脸识别系统通过摄像头采集人脸数据,可以智能采集各种类型的人脸。在收集人脸时,它可以对人脸进行跟踪,以确保收集到的人脸数据是有效的。
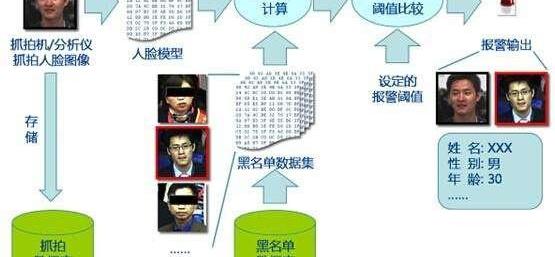
2.人脸图像采集完成后,系统可以根据采集到的图像进行处理。由于光线、面部表情和角度的影响,需要通过光线补偿和几何校正等技术对采集到的人脸进行处理和修复。
3.面部识别后匹配。采集人脸后,系统会自动从数据库中开始搜索,以检索匹配度最高的人脸信息。通过设置匹配度值,如果比较结果超过或近似等于……
et值,则将输出面部信息。因此,总体而言,匹配的基础是基于人脸的相似度值。该值越高,匹配度就越准确。
在这里可以看出,这里的图像识别原理与我们常见的指纹识别基本相似,只是指纹识别数据库保存在本地。首先,对人脸特征数据进行加密、收集和存储。在购买东西时,收集面部特征点,然后比较数据库的相似性,并输出最终的比较结果。
这里的重点是,由于购物中有大量的面部数据,因此需要云数据存储。这里收集的特征点的数量直接影响数据处理的速度。此外,在收集时,为了收集和保存,需要非常好的照明和图像。同时,付款时还需要良好的照明和图像环境,有时需要眨眼并进行现场测试。
由此可见,这里使用的环境是比较好的。采集到的图像亮度好,距离近,像素识别率高,需要识别的物体不多。它只用于数据库相似性比较,计算能力要求也特别高,可以快速比较特定信息。
当然,如果将所有物体的所有特征值收集并放置在云中,并具有足够强大的计算能力,则可以通过5G传输将结果快速反馈给车辆和机器。理论上,这条路也可以铺设。然而,云数据库需要非常大量的对象特征值,并且数据库越大,比较的工作量就越大,所需的时间就越长,5G传输的返回结果也有延迟,当信号不稳定时,无法及时获得结果。从初始图像到输出结果,一般要求在20ms以内。目前,这种算法基本上无法实现,所以我们只能走单机智能的道路。事实上,它有点类似于语音识别,其中基本上使用局部算法进行识别输出。深度学习的推理端被放置在本地,而训练则被放置在云中。

为什么特斯拉有勇气对激光雷达说不
视觉解决方案致力于解决通过相机“捕捉到什么”的问题。从工作原理来看,视觉解决方案以摄像头为主要传感器,收集来自外部的反射光,进一步呈现外部环境图像,这就是我们熟悉的摄像头功能。然后,进行图像分割、物体分类、目标跟踪、世界模型、多传感器融合、在线校准、视觉SLAM、ISP等一系列步骤进行匹配和深度学习,其核心环节是物体识别和匹配,或使用人工智能自监督学习来达到感知和分析物体的目的。需要解决的是“我拍的东西是什么”的问题。
要解释特斯拉的视觉系统是如何取得如此令人印象深刻的结果的,有必要首先考察主要机构批评的视觉解决方案的局限性,以及特斯拉是如何解决这些局限性的。

1.准确性问题;愿景问题
测距精度低,并且存在许多依赖性。当算法固定时,只有通过增加双目透镜之间的焦距或基线距离才能提高精度。然而,焦距的增加导致视场角的减小,基线距离的增加导致与最近的可见距离的距离。
双目系统可以覆盖目标方向上60度的最大视场,而激光雷达基本上是360度。
事实上,当处理单个相机时,这个问题确实是一个问题。随着角度的增加,距离将不可避免地减小。如果距离测量需要很远,可见视场角也会减小,影响对周围物体的判断。这是一个既不能是鱼也不能是熊掌的问题。俗话说,孩子们只做多项选择题。像特斯拉这样的硬汉离我们很远;
我们需要从大角度解决这两个问题。
特斯拉是一个既不选择单眼相机也不选择双目相机的钢铁直男。前置摄像头直接选择三眼摄像头。
0
这三个摄像头安装在挡风玻璃后面,由三个组件组成:前视宽视场、主视场和窄视场摄像头。
宽视野:大角度鱼眼镜头可以捕捉交通信号灯、行驶路径上的障碍物和彼此靠近的物体,非常适合城市街道和慢速交通场景。最大监测距离为60米。
主视野:覆盖大部分交通场景,最大监控距离为150米。
视野窄:能够清晰捕捉远处物体,适合高速交通场景。最大监测距离为250米。
通过这台三眼相机,钢铁直男解决了鱼和熊掌不能兼得的问题。有了宽视场角的摄像机,十字路口等复杂路况需要广角,高速公路上需要远距离摄像机,共同解决了这个问题。
2.双目测距精度与标定密切相关,但安装在车辆上的机械结构稳定性较差,难以同时识别道路和交通标志。
事实上,这是测量距离的稳定性问题,因为视觉距离检测很困难。自动驾驶的路径规划需要3D道路信息和3D障碍物,而基于摄像头只收集2D数据。因此,需要分析2D图像的每个像素,并将其恢复为真实的3D场景。在这背后,需要先进的图像处理算法和高计算硬件,并且可能存在重大错误。
双目视觉是通过计算两幅图像之间的视差来直接测量前方场景的距离,而无需确定前方存在何种类型的障碍物。因此,对于任何类型的障碍物,都可以根据距离信息的变化进行必要的警告或制动。双目视觉的原理与人眼的原理相似。利用双目三角测量原理,可以非常精确地测量物体的距离。
1
特斯拉使用三摄像头摄像头可以有效解决单眼摄像头测距精度低的问题,合理选择固定的机械位置可以解决稳定性问题,无需间隔校准。当然,软件算法也可以用于远程校准,这是测试每个制造商算法技能的时候。
要解决识别道路和交通标志的问题,实际上是通过安装摄像头的角度来解决的。
2
使用三套相机进行同步成像、GPS定时和地理位置、不同的安装角度和不同的焦距
短焦和长焦摄像头可以通过距离区分红绿灯、限速标志和路标等交通信号
这样做的优点是可以提取近距离的高角度交通标志,并使远处交通标志的成像足够大。2020年4月,特斯拉在美国推出了FSD解决方案,解决了自动识别红绿灯和停车标志的问题,这在技术上相对容易解决。
通过这三个摄像头,可以执行许多ADAS功能。
自动紧急制动、车道偏离警告、车道保持、行人警告、自动停车、交通标志识别、交通信号灯识别等都需要在图像识别的基础上建立,以实现车道线障碍物和行人检测的ADAS功能,这可以通过这三个摄像头实现。
2.软件算法的难度
视觉方案侧重于分类,但样本有局限性,限制了视觉识别的准确性,优化样本需要极高的人工智能学习能力和样本数据量。
视觉距离测量的原理是首先通过图像匹配识别目标,识别行人、物体、车辆模型等。然后根据目标在图像中的大小估计目标的距离。由于L3级及以上级别的自动驾驶需要机器……
e具有复杂的路况,要求车辆对路况具有精确的识别能力,而视觉技术需要解决“摄像头捕捉到什么物体”的问题,因此对神经网络的训练集要求很高。
对于训练方法,一种是通过机器视觉手动设置识别样本,并通过将收集的数据与样本直接匹配来识别它们。然而,识别物体的成功与否在很大程度上取决于样本的训练,而样本未覆盖的物体将很难区分;首先,需要建立并持续维护一个大样本特征数据库,以确保其中包含待识别目标的所有特征数据。例如,在一些特殊地区,为了专门检测大型动物,需要首先建立大型动物数据库;对于其他地区的一些非常规模型,也有必要首先将这些模型的特征数据添加到数据库中。如果缺乏识别目标的特征,将导致系统无法识别车辆模型、物体和障碍物,从而无法准确估计这些目标的距离,从而导致ADAS系统的遗漏。
另一种类型是人工智能学习,它可以通过自学习克服样本限制,但对算法和计算能力要求很高。此外,学习过程是一个“黑匣子”,输出过程未知,难以手动调试和纠正错误。
事实上,该算法的难度是可视化解决方案中最难解决的问题。没有孔专,瓷器工作就无法完成,太多的视觉解决方案制造商基本上放弃了这里。让我们看看Steel Straight Tesla是如何解决这个问题的。
特斯拉的视觉解决方案具有很高的算法和计算复杂性。特斯拉宣布了其数据流自动化计划的最终目标“休假行动”,该计划形成了从数据收集、培训、评估、计算能力平台到“影子模式”的数据收集和学习周期。
3
数据采集:使用8个摄像头采集车身周围的死角图像;
数据训练:使用PyTorch进行网络训练,特斯拉的网络训练包括48个不同的神经网络,
可以输出1000个不同的预测张量。其背后的训练量巨大,特斯拉在深度学习模型训练上花费了7万GPU小时;
落后的算力支持:特斯拉自主研发并构建了FSD芯片,每片芯片的算力值高达144TOPS。此外,特斯拉计划创建一台Dojo超级计算机,可以在云中对大量视频进行无监督学习训练。目前的发展进展非常有希望;
影子模式:特斯拉通过其独特的“影子模式”降低样本训练成本,提高识别准确性,这意味着特斯拉不断收集外部环境和驾驶员行为,并将其与自己的策略进行比较。如果驾驶员的实际操作与自己的判断不同,则当前数据将上传到特斯拉云,并对算法进行校正和训练。
4
从数据采集、本地芯片硬件处理、图像软件算法处理,到后端超级计算机的培训,都需要一系列的技术支持。最好独立开发芯片、操作系统、算法和控制器,以最大限度地提高芯片的性能。从Mobileye的黑匣子开发模式来看,车厂已经完全放弃了这种纯粹的视觉处理路径,如果不投资数千亿,估计大门是无法到达的,所以目前只有特斯拉这样的科技人有勇气对激光雷达说不。主要原因是特斯拉可以集成软件和硬件调试,再加上大量运行的视觉数据和基于云的Dojo超级计算机数据算法,这使得其他制造商无法复制特斯拉的模式。
参考材料:
1.小鹏吃了几碗冷面?激光雷达是对还是错?
https://baijiahao.baidu.com/sid=1684351629768924488& ; wfr=蜘蛛&for=个人电脑
2.车内传感器技术和产业链梳理,自动驾驶加速渗透
https://mp.weixin.qq.com/s/y1CCWyG8pJ8tONZTiiYXfw
本文首发于微信公众号:Po 1990。文章内容属于作者个人观点,不代表和讯网络的立场。投资者应据此操作,并承担风险。
综业快报消息,6月21日,和谐汽车公布,于2021年6月21日,该公司以每股328335港元的价格回购8935万股,斥资2957万港元。
1900/1/1 0:00:00新浪科技讯北京时间6月21日晚间消息,据韩联社报道,现代汽车集团今日表示,已从日本软银集团手中收购了波士顿动力公司80的股份。
1900/1/1 0:00:00大局向好,变革将至,内外双循环下,2021中国汽车工业迸发出无限生机。
1900/1/1 0:00:00优步CEO达拉科斯罗萨希在社交媒体上表示,他上周末花了部分时间为UberEats工作,体验了一把外卖小哥的辛苦。科斯罗萨希说,他在周末两天时间里“花了几小时”来送外卖。
1900/1/1 0:00:00盖世汽车讯据外媒报道,在被捕并免职接近3年后,日产前董事长卡洛斯戈恩再一次成为了该公司年度股东大会上的主要话题。管理层对戈恩下台的处理方式,以及公司业绩的下滑,都让股东感到不满。
1900/1/1 0:00:00盖世汽车讯据外媒报道,当地时间6月28日,美信集成产品公司宣布推出新一代红外动态光学传感器MAX25405,能够在更远的距离感知种类更多的手势。
1900/1/1 0:00:00