据外媒报道,为了确保各种安全关键系统能够安全运行并按需工作,密歇根州立大学的研究人员开发了一种方法,为在未知环境中运行的系统设计具有学习能力的安全控制器。
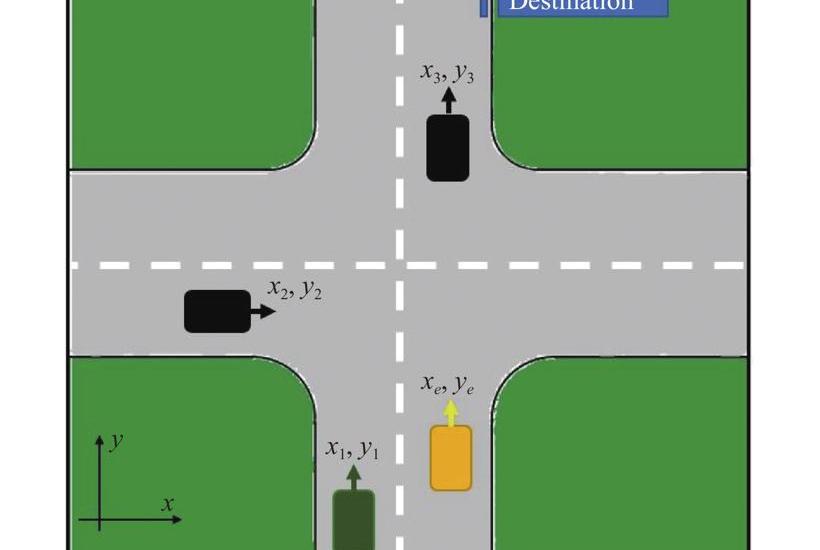
图片来源:IEEE/CAA自动化杂志这项研究由密歇根州立大学的Bahare Kiumarsi和Zahra Marvi联合进行,重点研究自动驾驶汽车在城市地区的安全运行。随着时间的发展,科学家们已经成功地设计了基于控制屏障函数的安全控制方法,该方法可以应用于许多领域,包括自适应巡航控制、机器人安全控制和无碰撞多智能体系统。这些方法通常可以与CBF和Lyapunov函数相结合来证明控制器的安全性和稳定性。密歇根州立大学的研究人员提出了一种支持学习的新型零控制屏障功能,即使环境中存在未知动态,该功能也可以在学习时安全运行。随着越来越多的安全关键系统部署在现实世界中,科学家必须能够确保这些系统始终保持安全。环境中的不确定因素会影响系统的安全运行。在研究城市环境中的自动驾驶汽车时,研究人员必须考虑这些不确定性。例如,自动驾驶汽车、半自动驾驶车辆、人类驾驶的汽车和行人将出现在同一区域。因此,科学家必须设计一种控制器,以确保系统的安全运行,尽管在同一空间航行的其他车辆和人类的行为存在不确定性。科学家需要能够依靠系统的安全性,同时确保系统尽可能高效地运行。密歇根州立大学研究人员的方法解决了为必须在不确定环境中运行的系统设计具有学习能力的安全控制器的问题。其新颖的学习方法可以确保自动驾驶汽车的安全,即使在与道路上其他车辆的不确定行为一起行驶时也是如此。现有的安全控制方法要求科学家对安全集合有一个完整的了解。在存在环境不确定性的情况下,为系统设计安全控制变得更具挑战性。这些安全关键系统必须能够快速理解不确定性,同时实现最大的安全性能。缓慢的模型学习方法可以提供所需的安全功能,但不能达到预期的性能。即使预期的估计误差随着时间的推移而减小,基于最小化建模误差的简单模型学习方法也不能满足所需的安全要求。博士候选人Zahra Marvi表示,“需要新的学习算法来尽可能避免安全集的错误信息。”研究人员开发的方法可以快速理解环境中的不确定性,并实现安全性能。助理教授Bahare Kiumarsi说,“满足安全约束至关重要,在控制设计阶段需要考虑,否则可能会导致严重后果。通过使用密歇根州立大学研究人员设计的这种方法,系统中的控制器可以采取更少的保守行动,从而实现更好的性能,提高系统的安全性和性能。
标签:
4月24日消息,长城汽车601633发布2022年第一季度报告,公司总营收3362亿元,同比增长804;归母净利润163亿元,同比小幅下降034;扣非净利润13
1900/1/1 0:00:00盖世汽车讯据外媒报道,Stellantis将进行两项行政调整,以扩大氢能源技术在商业领域的影响力。该公司已经任命JeanMichelBillig担任氢燃料电池开发业务的首席技术官。
1900/1/1 0:00:00今年初,在捷途品牌之夜上,捷途带来了一款全新硬派SUV的概念车TX,作为捷途汽车打造的全新SUV车型,新车与捷途大圣相同基于昆仑架构打造而来。
1900/1/1 0:00:00DHT、GHS、iDD、DMi、HiX,这些英文字母缩写几乎代表了中国汽车品牌在混动领域里的所有顶尖技术成就,但总归要分出个胜负的呀。
1900/1/1 0:00:00受到疫情、零部件原材料涨价等多种不利因素影响,大部分新能源车企纷纷对旗下车型的价格作出调整,或对订单排产作出调整。
1900/1/1 0:00:005月1日,造车新势力公布了2022年4月份交付量,本月受疫情影响较为严重,多地工厂及供应链出现停摆的情况,没有一家新势力车企交付量超过一万台。
1900/1/1 0:00:00